math — Mathematical functions¶
This module provides access to the mathematical functions defined by the C standard.
These functions cannot be used with complex numbers; use the functions of the same name from the cmath module if you require support for complex numbers. The distinction between functions which support complex numbers and those which don’t is made since most users do not want to learn quite as much mathematics as required to understand complex numbers. Receiving an exception instead of a complex result allows earlier detection of the unexpected complex number used as a parameter, so that the programmer can determine how and why it was generated in the first place.
The following functions are provided by this module. Except when explicitly noted otherwise, all return values are floats.
Number-theoretic and representation functions¶
Return the ceiling of x, the smallest integer greater than or equal to x. If x is not a float, delegates to x.__ceil__ , which should return an Integral value.
Return the number of ways to choose k items from n items without repetition and without order.
Evaluates to n! / (k! * (n — k)!) when k <= n and evaluates to zero when k > n .
Also called the binomial coefficient because it is equivalent to the coefficient of k-th term in polynomial expansion of (1 + x)ⁿ .
Raises TypeError if either of the arguments are not integers. Raises ValueError if either of the arguments are negative.
New in version 3.8.
Return a float with the magnitude (absolute value) of x but the sign of y. On platforms that support signed zeros, copysign(1.0, -0.0) returns -1.0.
Return the absolute value of x.
math. factorial ( n ) ¶
Return n factorial as an integer. Raises ValueError if n is not integral or is negative.
Deprecated since version 3.9: Accepting floats with integral values (like 5.0 ) is deprecated.
Return the floor of x, the largest integer less than or equal to x. If x is not a float, delegates to x.__floor__ , which should return an Integral value.
Return fmod(x, y) , as defined by the platform C library. Note that the Python expression x % y may not return the same result. The intent of the C standard is that fmod(x, y) be exactly (mathematically; to infinite precision) equal to x — n*y for some integer n such that the result has the same sign as x and magnitude less than abs(y) . Python’s x % y returns a result with the sign of y instead, and may not be exactly computable for float arguments. For example, fmod(-1e-100, 1e100) is -1e-100 , but the result of Python’s -1e-100 % 1e100 is 1e100-1e-100 , which cannot be represented exactly as a float, and rounds to the surprising 1e100 . For this reason, function fmod() is generally preferred when working with floats, while Python’s x % y is preferred when working with integers.
Return the mantissa and exponent of x as the pair (m, e) . m is a float and e is an integer such that x == m * 2**e exactly. If x is zero, returns (0.0, 0) , otherwise 0.5 <= abs(m) < 1 . This is used to “pick apart” the internal representation of a float in a portable way.
math. fsum ( iterable ) ¶
Return an accurate floating point sum of values in the iterable. Avoids loss of precision by tracking multiple intermediate partial sums:
The algorithm’s accuracy depends on IEEE-754 arithmetic guarantees and the typical case where the rounding mode is half-even. On some non-Windows builds, the underlying C library uses extended precision addition and may occasionally double-round an intermediate sum causing it to be off in its least significant bit.
For further discussion and two alternative approaches, see the ASPN cookbook recipes for accurate floating point summation.
math. gcd ( * integers ) ¶
Return the greatest common divisor of the specified integer arguments. If any of the arguments is nonzero, then the returned value is the largest positive integer that is a divisor of all arguments. If all arguments are zero, then the returned value is 0 . gcd() without arguments returns 0 .
New in version 3.5.
Changed in version 3.9: Added support for an arbitrary number of arguments. Formerly, only two arguments were supported.
Return True if the values a and b are close to each other and False otherwise.
Whether or not two values are considered close is determined according to given absolute and relative tolerances.
rel_tol is the relative tolerance – it is the maximum allowed difference between a and b, relative to the larger absolute value of a or b. For example, to set a tolerance of 5%, pass rel_tol=0.05 . The default tolerance is 1e-09 , which assures that the two values are the same within about 9 decimal digits. rel_tol must be greater than zero.
abs_tol is the minimum absolute tolerance – useful for comparisons near zero. abs_tol must be at least zero.
If no errors occur, the result will be: abs(a-b) <= max(rel_tol * max(abs(a), abs(b)), abs_tol) .
The IEEE 754 special values of NaN , inf , and -inf will be handled according to IEEE rules. Specifically, NaN is not considered close to any other value, including NaN . inf and -inf are only considered close to themselves.
New in version 3.5.
PEP 485 – A function for testing approximate equality
Return True if x is neither an infinity nor a NaN, and False otherwise. (Note that 0.0 is considered finite.)
New in version 3.2.
Return True if x is a positive or negative infinity, and False otherwise.
Return True if x is a NaN (not a number), and False otherwise.
Return the integer square root of the nonnegative integer n. This is the floor of the exact square root of n, or equivalently the greatest integer a such that a² ≤ n.
For some applications, it may be more convenient to have the least integer a such that n ≤ a², or in other words the ceiling of the exact square root of n. For positive n, this can be computed using a = 1 + isqrt(n — 1) .
New in version 3.8.
Return the least common multiple of the specified integer arguments. If all arguments are nonzero, then the returned value is the smallest positive integer that is a multiple of all arguments. If any of the arguments is zero, then the returned value is 0 . lcm() without arguments returns 1 .
New in version 3.9.
Return x * (2**i) . This is essentially the inverse of function frexp() .
Return the fractional and integer parts of x. Both results carry the sign of x and are floats.
Return the next floating-point value after x towards y.
math.nextafter(x, math.inf) goes up: towards positive infinity.
math.nextafter(x, -math.inf) goes down: towards minus infinity.
math.nextafter(x, 0.0) goes towards zero.
math.nextafter(x, math.copysign(math.inf, x)) goes away from zero.
New in version 3.9.
Return the number of ways to choose k items from n items without repetition and with order.
Evaluates to n! / (n — k)! when k <= n and evaluates to zero when k > n .
If k is not specified or is None, then k defaults to n and the function returns n! .
Raises TypeError if either of the arguments are not integers. Raises ValueError if either of the arguments are negative.
New in version 3.8.
Calculate the product of all the elements in the input iterable. The default start value for the product is 1 .
When the iterable is empty, return the start value. This function is intended specifically for use with numeric values and may reject non-numeric types.
New in version 3.8.
Return the IEEE 754-style remainder of x with respect to y. For finite x and finite nonzero y, this is the difference x — n*y , where n is the closest integer to the exact value of the quotient x / y . If x / y is exactly halfway between two consecutive integers, the nearest even integer is used for n . The remainder r = remainder(x, y) thus always satisfies abs(r) <= 0.5 * abs(y) .
Special cases follow IEEE 754: in particular, remainder(x, math.inf) is x for any finite x, and remainder(x, 0) and remainder(math.inf, x) raise ValueError for any non-NaN x. If the result of the remainder operation is zero, that zero will have the same sign as x.
On platforms using IEEE 754 binary floating-point, the result of this operation is always exactly representable: no rounding error is introduced.
New in version 3.7.
Return x with the fractional part removed, leaving the integer part. This rounds toward 0: trunc() is equivalent to floor() for positive x, and equivalent to ceil() for negative x. If x is not a float, delegates to x.__trunc__ , which should return an Integral value.
Return the value of the least significant bit of the float x:
If x is a NaN (not a number), return x.
If x is negative, return ulp(-x) .
If x is a positive infinity, return x.
If x is equal to zero, return the smallest positive denormalized representable float (smaller than the minimum positive normalized float, sys.float_info.min ).
If x is equal to the largest positive representable float, return the value of the least significant bit of x, such that the first float smaller than x is x — ulp(x) .
Otherwise (x is a positive finite number), return the value of the least significant bit of x, such that the first float bigger than x is x + ulp(x) .
ULP stands for “Unit in the Last Place”.
New in version 3.9.
Note that frexp() and modf() have a different call/return pattern than their C equivalents: they take a single argument and return a pair of values, rather than returning their second return value through an ‘output parameter’ (there is no such thing in Python).
For the ceil() , floor() , and modf() functions, note that all floating-point numbers of sufficiently large magnitude are exact integers. Python floats typically carry no more than 53 bits of precision (the same as the platform C double type), in which case any float x with abs(x) >= 2**52 necessarily has no fractional bits.
Power and logarithmic functions¶
Return the cube root of x.
New in version 3.11.
Return e raised to the power x, where e = 2.718281… is the base of natural logarithms. This is usually more accurate than math.e ** x or pow(math.e, x) .
Return 2 raised to the power x.
New in version 3.11.
Return e raised to the power x, minus 1. Here e is the base of natural logarithms. For small floats x, the subtraction in exp(x) — 1 can result in a significant loss of precision; the expm1() function provides a way to compute this quantity to full precision:
New in version 3.2.
With one argument, return the natural logarithm of x (to base e).
With two arguments, return the logarithm of x to the given base, calculated as log(x)/log(base) .
Return the natural logarithm of 1+x (base e). The result is calculated in a way which is accurate for x near zero.
Return the base-2 logarithm of x. This is usually more accurate than log(x, 2) .
New in version 3.3.
int.bit_length() returns the number of bits necessary to represent an integer in binary, excluding the sign and leading zeros.
Return the base-10 logarithm of x. This is usually more accurate than log(x, 10) .
Return x raised to the power y . Exceptional cases follow the IEEE 754 standard as far as possible. In particular, pow(1.0, x) and pow(x, 0.0) always return 1.0 , even when x is a zero or a NaN. If both x and y are finite, x is negative, and y is not an integer then pow(x, y) is undefined, and raises ValueError .
Unlike the built-in ** operator, math.pow() converts both its arguments to type float . Use ** or the built-in pow() function for computing exact integer powers.
Changed in version 3.11: The special cases pow(0.0, -inf) and pow(-0.0, -inf) were changed to return inf instead of raising ValueError , for consistency with IEEE 754.
Return the square root of x.
Trigonometric functions¶
Return the arc cosine of x, in radians. The result is between 0 and pi .
Return the arc sine of x, in radians. The result is between -pi/2 and pi/2 .
Return the arc tangent of x, in radians. The result is between -pi/2 and pi/2 .
Return atan(y / x) , in radians. The result is between -pi and pi . The vector in the plane from the origin to point (x, y) makes this angle with the positive X axis. The point of atan2() is that the signs of both inputs are known to it, so it can compute the correct quadrant for the angle. For example, atan(1) and atan2(1, 1) are both pi/4 , but atan2(-1, -1) is -3*pi/4 .
Return the cosine of x radians.
Return the Euclidean distance between two points p and q, each given as a sequence (or iterable) of coordinates. The two points must have the same dimension.
Roughly equivalent to:
New in version 3.8.
Return the Euclidean norm, sqrt(sum(x**2 for x in coordinates)) . This is the length of the vector from the origin to the point given by the coordinates.
For a two dimensional point (x, y) , this is equivalent to computing the hypotenuse of a right triangle using the Pythagorean theorem, sqrt(x*x + y*y) .
Changed in version 3.8: Added support for n-dimensional points. Formerly, only the two dimensional case was supported.
Changed in version 3.10: Improved the algorithm’s accuracy so that the maximum error is under 1 ulp (unit in the last place). More typically, the result is almost always correctly rounded to within 1/2 ulp.
Return the sine of x radians.
Return the tangent of x radians.
Angular conversion¶
Convert angle x from radians to degrees.
Convert angle x from degrees to radians.
Hyperbolic functions¶
Hyperbolic functions are analogs of trigonometric functions that are based on hyperbolas instead of circles.
Return the inverse hyperbolic cosine of x.
Return the inverse hyperbolic sine of x.
Return the inverse hyperbolic tangent of x.
Return the hyperbolic cosine of x.
Return the hyperbolic sine of x.
Return the hyperbolic tangent of x.
Special functions¶
The erf() function can be used to compute traditional statistical functions such as the cumulative standard normal distribution:
New in version 3.2.
Return the complementary error function at x. The complementary error function is defined as 1.0 — erf(x) . It is used for large values of x where a subtraction from one would cause a loss of significance.
New in version 3.2.
New in version 3.2.
Return the natural logarithm of the absolute value of the Gamma function at x.
New in version 3.2.
Constants¶
The mathematical constant π = 3.141592…, to available precision.
The mathematical constant e = 2.718281…, to available precision.
The mathematical constant τ = 6.283185…, to available precision. Tau is a circle constant equal to 2π, the ratio of a circle’s circumference to its radius. To learn more about Tau, check out Vi Hart’s video Pi is (still) Wrong, and start celebrating Tau day by eating twice as much pie!
New in version 3.6.
A floating-point positive infinity. (For negative infinity, use -math.inf .) Equivalent to the output of float(‘inf’) .
New in version 3.5.
A floating-point “not a number” (NaN) value. Equivalent to the output of float(‘nan’) . Due to the requirements of the IEEE-754 standard, math.nan and float(‘nan’) are not considered to equal to any other numeric value, including themselves. To check whether a number is a NaN, use the isnan() function to test for NaNs instead of is or == . Example:
Changed in version 3.11: It is now always available.
New in version 3.5.
CPython implementation detail: The math module consists mostly of thin wrappers around the platform C math library functions. Behavior in exceptional cases follows Annex F of the C99 standard where appropriate. The current implementation will raise ValueError for invalid operations like sqrt(-1.0) or log(0.0) (where C99 Annex F recommends signaling invalid operation or divide-by-zero), and OverflowError for results that overflow (for example, exp(1000.0) ). A NaN will not be returned from any of the functions above unless one or more of the input arguments was a NaN; in that case, most functions will return a NaN, but (again following C99 Annex F) there are some exceptions to this rule, for example pow(float(‘nan’), 0.0) or hypot(float(‘nan’), float(‘inf’)) .
Note that Python makes no effort to distinguish signaling NaNs from quiet NaNs, and behavior for signaling NaNs remains unspecified. Typical behavior is to treat all NaNs as though they were quiet.
Как перевести градусы в радианы в питоне
Встроенный модуль math в Python предоставляет набор функций для выполнения математических, тригонометрических и логарифмических операций. Некоторые из основных функций модуля:
pow(num, power) : возведение числа num в степень power
sqrt(num) : квадратный корень числа num
ceil(num) : округление числа до ближайшего наибольшего целого
floor(num) : округление числа до ближайшего наименьшего целого
factorial(num) : факториал числа
degrees(rad) : перевод из радиан в градусы
radians(grad) : перевод из градусов в радианы
cos(rad) : косинус угла в радианах
sin(rad) : синус угла в радианах
tan(rad) : тангенс угла в радианах
acos(rad) : арккосинус угла в радианах
asin(rad) : арксинус угла в радианах
atan(rad) : арктангенс угла в радианах
log(n, base) : логарифм числа n по основанию base
log10(n) : десятичный логарифм числа n
Пример применения некоторых функций:
Также модуль math предоставляет ряд встроенных констант, такие как PI и E:
Python: Convert Degrees to Radians (and Radians to Degrees)

In this tutorial, you’ll learn how to use Python to convert degrees to radians and radians to degrees. You’ll learn what the relationship between degrees and radians is. Then you’ll learn how to use math library and the numpy library to use Python to convert degrees to radians and radians to degrees.
The Quick Answer: Use math.radians() and math.degrees()
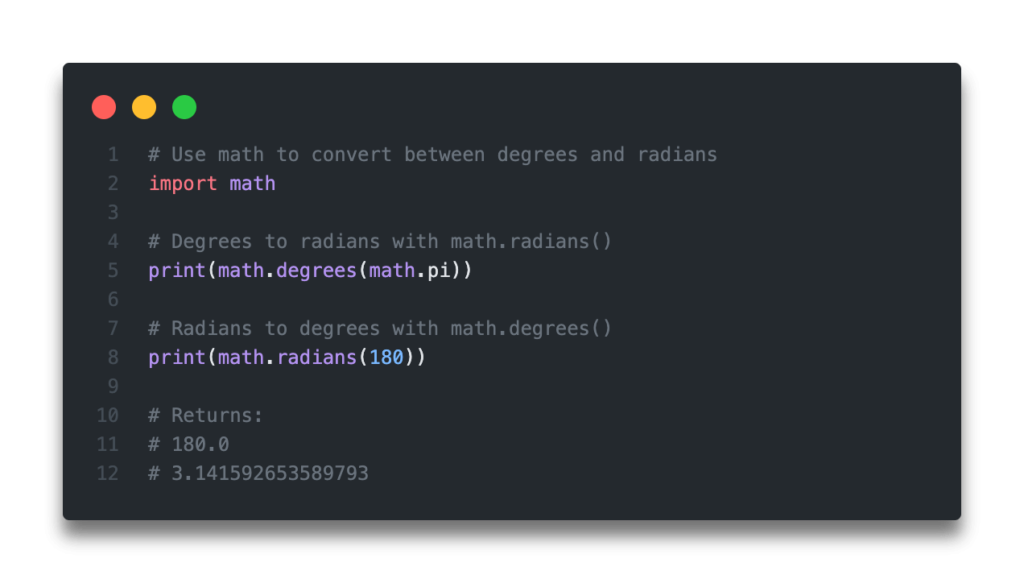
Table of Contents
What are degrees and radians?
Degrees and radians are commonly used metrics that are used to represent angles. Because of their utility, its helpful to know how to convert between them.
The formula used to calculate a degree, with a known radian is:
degrees = r * (180° / pi)
The formula used to calculate a radian, with a known number of degrees:
radians = degrees * (pi / 180°)
Now that you know the relationship between degrees and radians, let’s explore how to convert between them using the math library.
Want to learn more about calculating the square root in Python? Check out my tutorial here, which will teach you different ways of calculating the square root, both without Python functions and with the help of functions.
Use Math to Convert Degrees to Radians
The math library comes with a helpful function, radians() , that allows us to convert between degrees and radians. The math.radians() function takes a single input, a value that represents a degree, and returns a value that represents a radian.
Let’s try a few practical examples. We know, based on the formula, that if we were to pass in the value of pi , that we should be able to return the value of 180 .
Let’s give this a shot by using the math library’s pi constant, which can be accessed by math.pi :
We can see here that the correct value is returned. Now let’s try passing in another value:
In the next section, you’ll learn how to use the math library to convert from radians to degrees.
Want to learn more about Python for-loops? Check out my in-depth tutorial that takes your from beginner to advanced for-loops user! Want to watch a video instead? Check out my YouTube tutorial here.
Use Math to Convert Radians to Degrees
Similar to how the math library has a function to convert radians into degrees, we can use the radians function to convert degrees into radians.
We know, based on the formula, that if we pass in the value of 180 degrees, that the value of pi should be returned.
Let’s try doing this using Python:
Now that we have confirmed this, let’s try passing in another value:
In the next section, you’ll learn how to convert degrees to radians using Python and numpy.
Want to learn more about Python list comprehensions? Check out this in-depth tutorial that covers off everything you need to know, with hands-on examples. More of a visual learner, check out my YouTube tutorial here.
Use Numpy to Convert Radians to Degrees
Similar to how the math library comes with built-in functions to convert between radians and degrees, the popular numerical library numpy comes with similar functions.
In order to use numpy to convert from degrees to radians, we can use the radians() function.
Let’s try again to convert the value of pi to see if it returns the value of 180:
Now let’s try another numpy to see its result:
In the next section, you’ll use numpy to convert radians to degrees.
Need to check if a key exists in a Python dictionary? Check out this tutorial, which teaches you five different ways of seeing if a key exists in a Python dictionary, including how to return a default value.
Use Numpy to Convert Degrees to Radians
Similar to using numpy to convert degrees to radians, we can also use numpy to convert radians to degrees. For this, we’ll use the np.radians() function. This function takes a single input, a value that represents radians, and returns a single output, a value that represents degrees.
Let’s pass in the value of 180 again and see if it returns the value of pi :
Now that that’s confirmed, let’s check another value:
Want to learn how to pretty print a JSON file using Python? Learn three different methods to accomplish this using this in-depth tutorial here.
Conclusion
In this tutorial, you learned how to use Python to convert radians to degrees and degrees to radians. You also learned how to use both the math and numpy libraries to convert radians to degrees.
To learn more about the math library, check out the official documentation here.
How to convert Python degrees to radians
In this python tutorial, you will learn about the Python degrees to radians. Let us see how to convert degrees to radians in Python.
Also, we will check:
- What is a python math module?
- Python degrees to radians
- Python radians to degrees
- Python degrees to radians using numpy
- Python radians to degrees using numpy
- Write a python program to convert radian to degree
- How to print the degree symbol in python
- How to convert a number to radians in python
- Convert angles from degrees to radians in python
Table of Contents
What is a python math module?
Python has a built-in module that can be used for the mathematical task on numbers. The math module contains functions for calculating the various trigonometric ratios for a given angle.
The math module presents two angles conversion function which is degrees() and radians(). The math module has a set of methods.
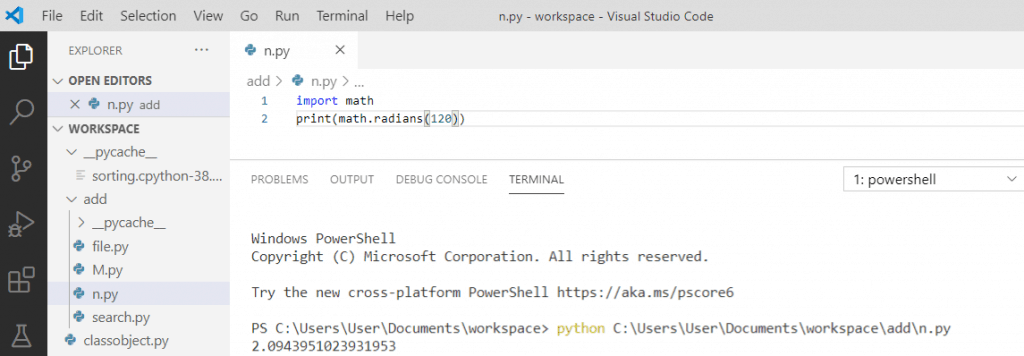
Python degrees to radians
In python, math.radians() method is used to convert a degree value to radians. So, we will first import math module.
Example:
After writing the above code (python degrees to radians), Ones you will print “math.radians(120)” then the output will appear as a “ 2.0943951023931953 “.
Here, math.radians() convert the degree to radians value.
You can refer to the below screenshot for python degrees to radians.
This is how we can convert degrees to radian in Python.
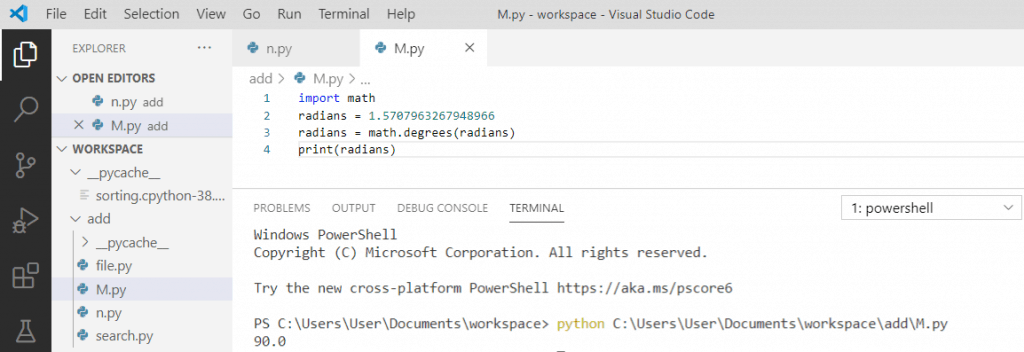
Python radians to degrees
Here, we will see how we can convert radians to degrees in python.
To convert radians to degrees, we will use math.degrees() for convert radians to degrees.
Example:
After writing the above code (python radians to degrees), Ones you will print “math.degrees()” then the output will appear as a “ 90.0 “. Here, math.degrees(radians) convert the radians value to degrees.
You can refer to the below screenshot for python radians to degrees.
The above code, we can use to convert radians to degrees in Python.
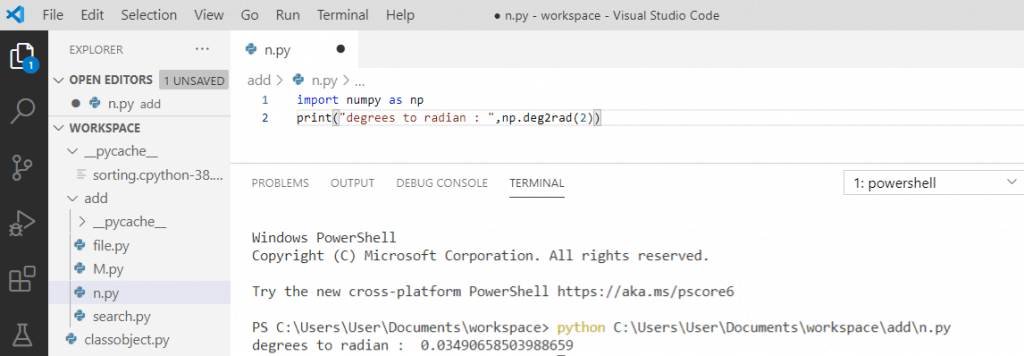
Python degrees to radians using numpy
Let’s see how to convert degrees to radians using numpy.
To convert degrees to radians, we have to import numpy package first. It has an inbuilt function name deg2rad() which can directly convert degrees to radians.
Example:
After writing the above code (python degrees to radians using numpy), Ones you will print ” np.deg2rad(2)” then the output will appear as “ degrees to radian: 0.03490658503988659 “. Here, np.deg2rad(2) will convert degrees to radians.
You can refer to the below screenshot for Python degrees to radians using numpy.
Python radians to degrees using numpy
To convert radians to degrees in Python, we have to import numpy package first. It has an inbuilt function name rad2deg() which can directly convert radians to degrees.
Example:
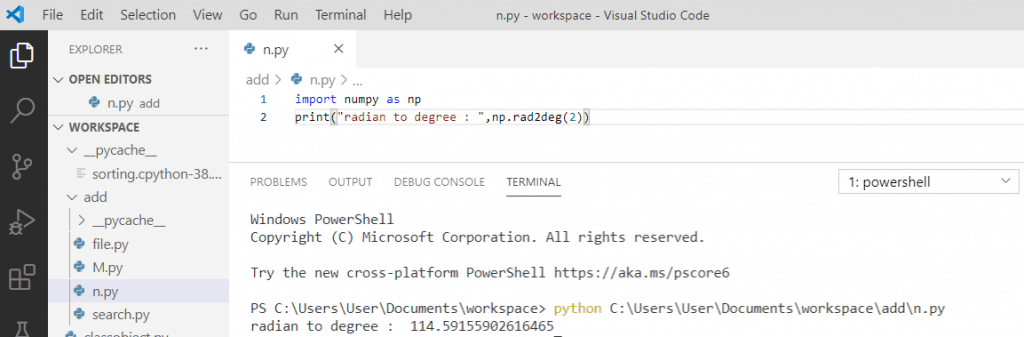
After writing the above code (python radians to degrees using numpy), Ones you will print ” np.rad2deg(2)” then the output will appear as “ radian to a degree: 114.59155902616465 “. Here, np.rad2deg(2) will convert radians to degrees.
You can refer to the below screenshot for python radians to degrees using numpy.
Write a python program to convert radian to degree
In this program, we have taken the pi value as 3.14159 and the radian as 10 while printing it will convert the radian to a degree.
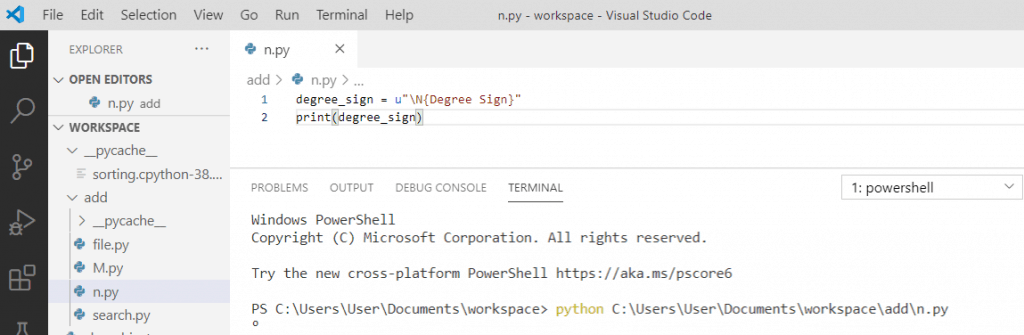
After writing the above code (how to print the degree symbol in python), Once you will print “(degree_sign)” then the output will appear as a “ ° “. Here, u”\N
You can refer to the below screenshot how to print the degree symbol in python.
How to convert a number to radians in python
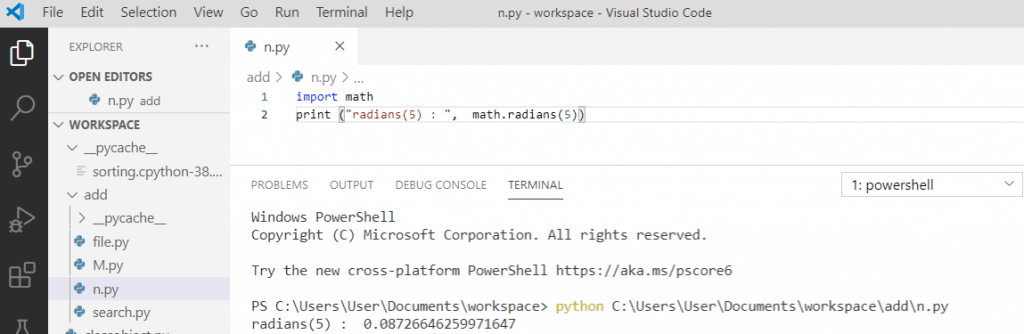
Firstly, we need to import math module. To convert a number to radians in Python, we will use radians(number) to convert the number to radians and we need to call this function using a math object.
Example:
After writing the above code (how to convert a number to radians in python), Once you will print “math.radians(5)” then the output will appear as a “ radians(5): 0.08726646259971647 “. Here, math.radians(5) is used to convert a number to radians in python.
You can refer to the below screenshot how to convert a number to radians in python.
Convert angles from degrees to radians in python
Now, we will see how to convert angles from degrees to radians in python.
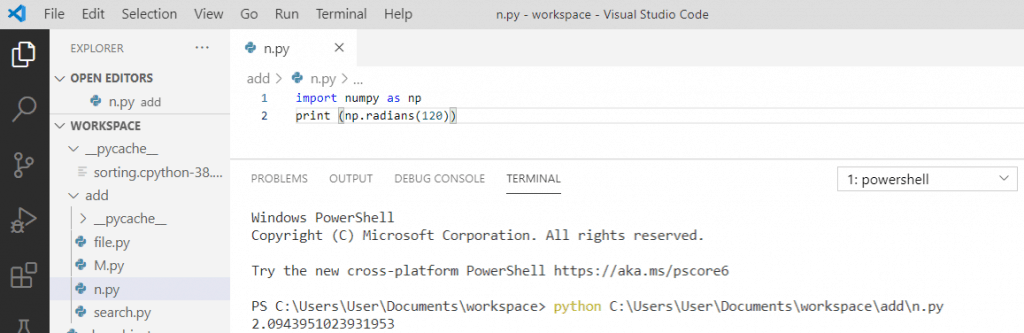
We will first import numpy module and then we will print np.radians(120) and it will get converted to radians.
Example:
You can refer to the below screenshot Convert angles from degrees to radians in python.
You may like the following Python tutorials:
In this Python tutorial we learned about Python degrees to radians. Also, we covered these below topics:
- What is a python math module?
- How to convert degrees to radians in Python
- How to convert radians to degrees in Python
- Python degrees to radians using numpy
- Python radians to degrees using numpy
- Write a python program to convert radian to degree
- How to print the degree symbol in python
- How to convert a number to radians in python
- Convert angles from degrees to radians in python

Python is one of the most popular languages in the United States of America. I have been working with Python for a long time and I have expertise in working with various libraries on Tkinter, Pandas, NumPy, Turtle, Django, Matplotlib, Tensorflow, Scipy, Scikit-Learn, etc… I have experience in working with various clients in countries like United States, Canada, United Kingdom, Australia, New Zealand, etc. Check out my profile.