SamsPcbGuide, часть 7: Трассировка сигнальных линий. Дифференциальные пары
Это седьмая статья из цикла и заключительная в блоке, посвящённом трассировке сигнальных линий. Дальше есть идея развивать проект и выходить на руководство по проектированию печатных плат в виде удобной книги, поэтому по публикациям, возможно. будет пауза. В статье рассматривается важная тема — дифференциальная схема передачи данных, получающая всё большее распространение в современных системах, и предлагаются рекомендации по трассировке дифференциальных пар, позволяющей обеспечить преимущества этой схемы.
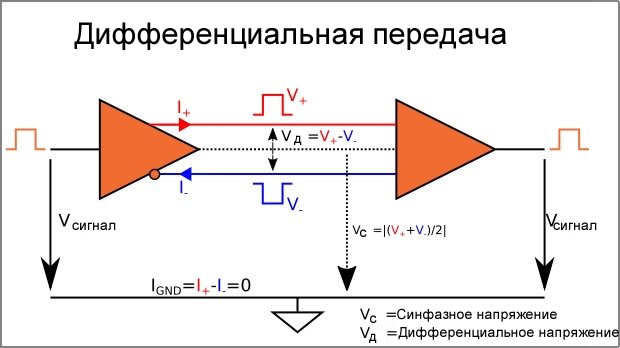
В предыдущей было показано, что перекрёстная связь между независимыми сигнальными линиями является источником нежелательных помех. Однако в случае дифференциальной схемы передачи сильная перекрёстная связь, напротив, делает сигнал более устойчивым к помехам. При такой схеме используются две линии (дифференциальная пара), источники сигнала которых находятся в противофазе, а приёмник реагирует на разницу напряжений на линиях VDIFF= V+-V– (рис. 1). Синфазный сигнал (англ. common signal) определяется как VCOMM=1/2∙(V++ V–) и может быть ненулевым, например, как в распространённом стандарте LVDS. Дифференциальная пара характеризуется двумя сопротивлениями:

Вводная теория дифференциальной передачи сигналов описывается во многих источниках, например, в [1]. С точки зрения проектирования печатных плат важно остановиться на преимуществах дифференциальной схемы относительно ассиметричной (англ. single-ended) и на требованиях к топологии дифференциальных пар, эти преимущества обеспечивающие.
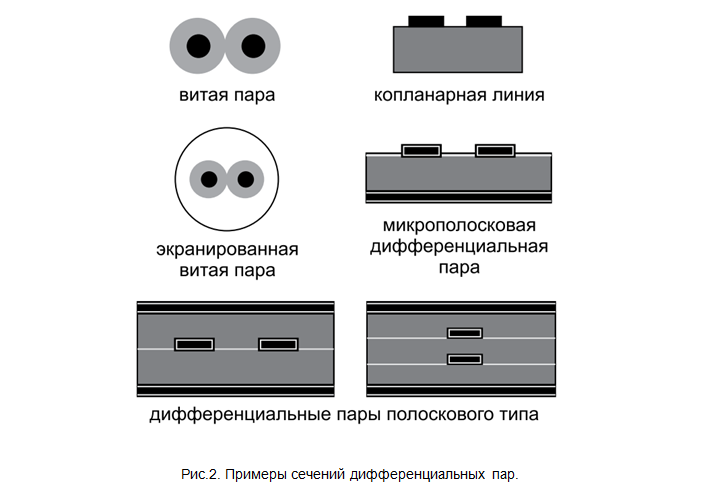
Прежде всего, идеальная дифференциальная пара симметрична, то есть на протяжении всей длины её сечение должно быть неизменным и обладать осью симметрии (рис. 2). Это, так же, как и в случае ассиметричной линии передачи, обеспечивает постоянство волнового сопротивления дифференциальной пары, что значительно снижает отражения в линии и искажения сигнала.
Каждой линии дифференциальной пары соответствует своё распределение возвратного тока в опорном слое. Если взаимная связь между линиями пары значительно меньше, чем их связь с опорным слоем, то распределения возвратных токов не пересекаются (рис. 3-А). Такая дифференциальная пара называется дифференциальной парой со слабой взаимной связью (англ. loosly coupled differential line, weak coupling). Так как распределение высокочастотных составляющих сигнала сконцентрировано в опорном слое в области ±3∙h, то практическим критерием для слабой связи является условие, что расстояние между краями печатных дорожек s>6∙h или s>3∙w. Так как дифференциальный импеданс пары со слабой связью практически не зависит от расстояния между дорожками ZDIFF≈2∙Z0, то это расстояние может меняться вдоль длины линии – например, при наличии препятствия на пути дифференциальной пары. Это упрощает требования к топологии дифференциальной пары, однако такие линии лишены основных преимуществ дифференциальной передачи данных.

Уменьшения расстояния между линиями до s≤2∙h приводит к значительному увеличению взаимной связи и перекрытию распределений возвратных токов в опорном слое (рис. 3-Б). Такая дифференциальная пара называется дифференциальной парой с сильной взаимной связью (англ. tightly coupled differential line). Дифференциальный импеданс становится в большей степени зависимым от расстояния между дорожками. Его значение снижается, поэтому для сохранения прежнего значения требуются более узкие дорожки, что несколько повышает омические потери. Однако именно такая топология дифференциальной пары обеспечивает следующие преимущества относительно ассиметричной линии:
- Бóльшая устойчивость дифференциального сигнала к наведённым помехам, в том числе к перекрёстным помехам и помехам в опорном слое. Близкое расположение и симметрия линий приводит к тому, что наведённые помехи на каждую из линий практически равны VNOISE + ≈VNOISE — , поэтому дифференциальная помеха мала VNOISE DIFF =VNOISE + -VNOISE — ≈0. Эта помеха тем меньше, чем дальше от дифференциальной пары находится её источник.
- Меньший уровень ЭМИ и создаваемых перекрёстных помех. Так как сигналы V+ и V– находятся в противофазе, то излучаемые ими электромагнитные поля примерно равны по величине и имеют противоположное друг другу направление. Это приводит к тому, что суперпозиция полей в дальнем поле стремится к нулю. Тот же эффект значительно снижает создаваемые дифференциальной парой перекрёстные помехи в ближнем поле.
- Меньшее влияние разрывов в опорном слое. Возвратные токи I+ и I– также находятся в противофазе, при этом в силу геометрической симметрии их распределения в опорном слое симметричны. В связи с этим суммарный ток в опорном слое IREF = I+ + I– уменьшается, а в области перекрытия становится равным нулю. В случае полного перекрытия, когда дифференциальная пара находится на удалении от опорного слоя h>2∙(s+w) и взаимная связь линий значительно превышает их связь с опорным слоем, ток в опорном слое отсутствует (рис. 3-В). Такая ситуация может возникать, в частности, когда дифференциальная пара пересекает широкий разрыв в опорном слое. Несмотря на то, что импеданс в месте пересечения претерпевает локальное изменение, искажения дифференциального сигнала малы по сравнению с искажениями ассиметричного сигнала в подобном случае [1].
- строгая противофазность сигналов на всём протяжении линии,
- отсутствие помех синфазного сигнала.

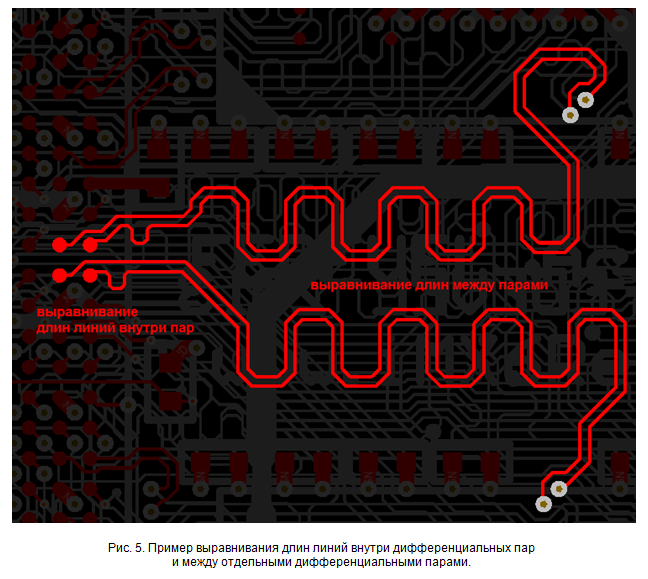
Распространённой практикой выравнивания длин линий (англ. length matching, tuning) является увеличение длины более короткой линий за счёт дополнительных изгибов, которые могут образовывать регулярную структуру (рис. 5). Очевидно, что при этом неизбежно изменяется расстояние между линиями пары. Это в свою очередь приводит к локальному изменению импеданса пары и возникновению отражений. Д. Брукс в одной из статей высказывает мнение, что задача выравнивания длин линий пары имеет бóльшую важность с точки зрения целостности сигналов и ЭМС. А выбор геометрии изгибов не имеет критического значения, с той лишь оговоркой, что длинные и узкие изгибы не рекомендуются, так как могут приводить к искажениям за счёт сильной взаимной связи участков. Однако этот тезис не является универсальным правилом. Дело в том, что существуют и более продвинутая методика выравнивания длин линий, которая заключается в одновременном сохранении импеданса пары в местах изгибов (за счёт изменений ширины линий, применения локальных вырезов в опорном слое и т.п.). Однако построение такой геометрии выравнивания является достаточно сложной задачей, требующей применения специализированных САПР, и оправдана только для гигагерцовых сигнальных линий. Другой вариант – это локальное увеличение расстояния между линиями пары и выравнивание за счёт изгибов на одной из линий. Иными словами, осуществление локального перехода к дифференциальной паре со слабой связью, для которой импеданс не так сильно зависит от расстояния между линиями (что наблюдается в местах изгибов). Примеры и более подробная информация по этим методикам может быть найдена в материалах, представленных на сайте Simberian, Inc.
Критерий достаточной степени равенства длин линий приводится в [1]: «Длины линий дифференциальной пары должны быть выровнены между собой с точностью ∆L<0,1∙tR∙v. Участок выравнивания рекомендуется располагать в той части дифференциальной пары, где симметрия уже нарушена (например, расположением выводов микросхемы)». По аналогии с ассиметричными линиями влияние локальной неоднородности дифференциального импеданса тем меньше, чем меньше электрическая длина участка выравнивания по сравнению с длительностью фронта сигнала.
Задача осложняется тем, что выравнивание прекрасно работает только для полосковой линии, для которой скорости распространения синфазного и дифференциального сигналов равны. Для микрополосковой линии даже идеальное выравнивание длин линий пары не обеспечивает отсутствия искажений, а только является методом их снижения. Но так как полосковая линия требует перехода на внутренние слои с применением переходных отверстий, самих по себе являющихся неоднородностью, то нельзя однозначно сказать, что у микрополосковой линии нет преимуществ. Безусловно, значимость этих эффектов растёт с повышением верхней границы частотной полосы сигнала. И если на частотах ниже 1 ГГц выравнивание обеспечивает низкий уровень искажений, то в области нескольких гигагерц и выше не существует универсальных рекомендаций и задача трассировки решается с помощью моделирования для каждого конкретного случая.
Помехи синфазного сигнала могут возникать как в самой дифференциальной паре из-за любой её несимметричности, так могут и наводиться с других сигнальных линий. Исключить искажения невозможно, однако с помощью согласования линии, которое препятствует возникновению повторных отражений и осцилляций, можно свести к минимуму их последствия. Основные методы согласования дифференциальной пары на дальнем конце представлены в таблице 1. Схема без согласования синфазного сигнала проста и поэтому используется достаточно часто, однако при наличии синфазных помех в линий простота оборачивается потенциальными проблемами. В отличие от дифференциального сигнала, синфазный сигнал является хорошим источником ЭМИ. Особенно синфазные помехи становятся критичными при использовании для передачи сигнала неэкранированной витой пары, поэтому рекомендуется использовать экранированные витые пары и синфазные дроссели на выходе.
Таблица 1. Методы согласования сигнальной линии.
| Название и схема | Уровень потерь | Комментарии |
|---|---|---|
 |
низкий |  |
 |
высокий |  |
 |
высокий | |
 |
средний |  |
Примечания:
1. При расчёте значений согласующих сопротивлений удобно использовать значения импеданса чётного ZEVEN (англ. even mode) и нечётного ZODD (англ. odd mode) режимов работы дифференциальной пары. По определению это значения импеданса одной из линий в специальных режимах работы, когда сигнал при распространении в дифференциальной паре не искажается. В случае симметричной дифференциальной пары это равные сигналы V+ = V– для чётного режима и противофазные сигналы V+ = –V– для нечётного режима. При этом они связаны со значениями характеристических импедансов дифференциальной пары следующими соотношениями: ZDIFF= 2∙ZODD, ZCOMM=1/2∙ZEVEN.
2. Для дифференциальной пары со слабой взаимной связью ZODD ≈ ZEVEN ≈ Z0 и T-образные схемы согласования вырождаются в параллельную схему согласования каждой из линий.
Дифференциальная схема обладает множеством преимуществ относительно ассиметричной и является основной для надёжных и высокоскоростных стандартов передачи данных, в том числе для систем с большим количеством узлов. С продолжением тенденции роста тактовых частот разработчикам придётся всё чаще сталкиваться с трассировкой дифференциальных пар, поэтому данная компетенция является стратегически важной и должна быть основана не только на общих рекомендациях, а подкреплена результатами моделирования в специализированных САПР и экспериментальными данными.
Литература
[1] Bogatin E. «Signal and power integrity — simplified», 2nd ed., Pearson, 2010
Статья была впервые опубликована в журнале «Компоненты и технологии» 2018, №5. Публикация на «Habr» согласована с редакцией журнала.
Зачем и как использовать дифференциальную передачу сигналов
Основы: несимметричная и дифференциальная передачи сигналов
Во-первых, нам нужно изучить некоторые основы того, что означает несимметричная передача сигналов, прежде чем мы сможем перейти к дифференциальной передаче сигналов и ее характеристикам.
Несимметричная передача сигналов
Несимметричная передача сигналов – это простой и распространенный способ передачи электрического сигнала от отправителя к приемнику. Электрический сигнал передается с помощью напряжения (часто с помощью изменяющегося напряжения), которое измеряется относительно фиксированного потенциала, обычно узел 0 В, называемый «землей».
Один проводник переносит сигнал, и один проводник переносит общий опорный потенциал. Ток, связанный с сигналом, поступает от отправителя к приемнику и возвращается к источнику питания через соединение земли. Если передается несколько сигналов, схема потребует по одному проводнику для каждого сигнала плюс одно общее соединение земли; таким образом, например, 16 сигналов могут быть переданы с помощью 17 проводников.
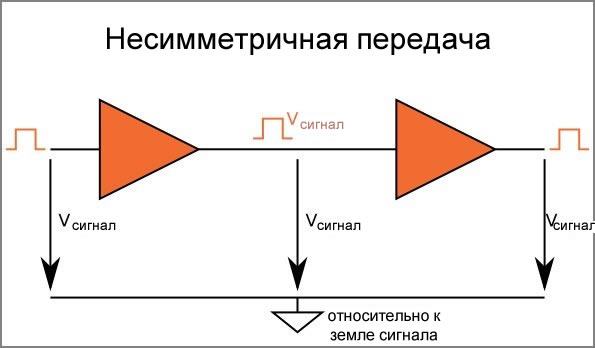 Топология несимметричной передачи сигналов
Топология несимметричной передачи сигналов
Дифференциальная передача сигналов
Дифференциальная передача сигналов, являющаяся менее распространенной по сравнению с несимметричной передачей, использует два двухтактных сигнала напряжения для передачи одного информационного сигнала. Таким образом, один информационный сигнал требует пары проводников; первый переносит сигнал, а второй переносит инвертированный сигнал.
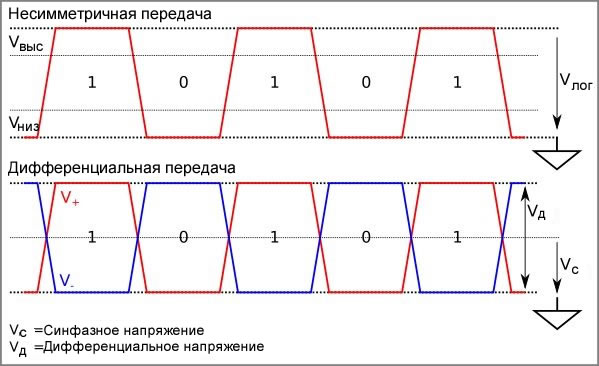 Обобщенные временные диаграммы несимметричной передачи сигналов и дифференциальной передачи сигналов
Обобщенные временные диаграммы несимметричной передачи сигналов и дифференциальной передачи сигналов
Приемник извлекает информацию, обнаруживая разность потенциалов между инвертированным и неинвертированным сигналами. Два сигнала напряжения «симметричны», что означает, что они имеют равную амплитуду и противоположную полярность относительно синфазного напряжения. Обратные токи, связанные с этими напряжениями, также сбалансированы и, таким образом, компенсируют друг друга; по этой причине можно сказать, что дифференциальные сигналы имеют (в идеале) нулевой ток через соединение земли.
При дифференциальной передаче сигналов отправитель и получатель необязательно должны иметь общую опорную точку земли. Однако использование дифференциальной передачи не означает, что различия потенциалов земли у отправителя и получателя не влияют на работу схемы.
Если передается несколько сигналов, то для каждого сигнала требуется два проводника, и часто необходимо или, по крайней мере, полезно включить соединение земли, даже если все сигналы являются дифференциальными. Так, например, для передачи 16 сигналов потребуется 33 проводника (для несимметричной передачи было необходимо 17). Это демонстрирует очевидный недостаток дифференциальной передачи сигналов.
 Топология дифференциальной передачи сигналов
Топология дифференциальной передачи сигналов
Преимущества дифференциальной передачи сигналов
Однако существуют важные преимущества дифференциальной передачи сигналов, которые могут более чем компенсировать увеличение количества проводников.
Нет обратного тока
Поскольку у нас (в идеале) нет обратного тока, опорная земля становится менее важной. Потенциалы земли у отправителя и получателя могут даже различаться или изменяться в пределах допустимого диапазона. Тем не менее, вы должны быть осторожны, потому что дифференциальная передача сигналов со связью по постоянному току (например, USB, RS-485, CAN) обычно требует общего потенциала земли, чтобы сигналы оставались в пределах максимально и минимально допустимого синфазного напряжения.
Устойчивость к внешним электромагнитным помехам и перекрестным помехам
Если электромагнитные помехи (ЭМП) или перекрестные помехи (т.е. электромагнитные помехи, создаваемые соседними сигналами) вводятся извне относительно дифференциальных проводников, то они равномерно добавляются к инвертированному и неинвертированному сигналам. Приемник реагирует на разность напряжений между двумя сигналами, а не на несимметричное (т.е. относительно земли) напряжение, и, таким образом, схема приемника значительно уменьшит амплитуду внешних и перекрестных помех.
Вот почему дифференциальная передача сигналов менее чувствительна к внешним электромагнитным помехам, перекрестным помехам или любым другим шумам, которые добавляются к обоим сигналам дифференциальной пары.
Уменьшение исходящих электромагнитных помех и перекрестных помех
Быстрые переходы, такие как нарастающий и спадающий фронты цифровых сигналов, могут генерировать значительные количества электромагнитных помех. И несимметричная передача сигналов, и дифференциальная передача сигналов генерируют электромагнитные помехи, но два сигнала в дифференциальной паре будут создавать электромагнитные поля, которые (в идеале) равны по амплитуде, но противоположны по полярности. Это в сочетании с технологиями, которые сохраняют маленькое расстояние между этими двумя проводниками (например, использование кабеля с витой парой), гарантирует, что излучения от этих двух проводников будут в значительной степени компенсировать друг друга.
Работа с низким напряжением
Несимметричные сигналы должны поддерживать относительно высокое напряжение для обеспечения достаточного отношения сигнал/шум (С/Ш, SNR). Наиболее распространенными напряжениями несимметричных интерфейсов являются 3,3 В и 5 В. Благодаря своей повышенной устойчивости к шуму дифференциальные сигналы могут использовать более низкие напряжения, поддерживая соответствующее отношение сигнал/шум. Кроме того, отношение сигнал/шум автоматически увеличивается в два раза по сравнению с эквивалентной несимметричной реализацией, поскольку динамический диапазон в дифференциальном приемнике в два раза выше динамического диапазона каждого сигнала в дифференциальной паре.
Возможность успешно передавать данные с использованием более низких напряжений сигналов имеет несколько важных преимуществ:
- могут использоваться более низковольтные источники питания;
- меньшие изменения напряжения во время переходов:
- уменьшаются излучаемые электромагнитные помехи;
- снижается потребление электроэнергии;
- допускается работа на более высоких частотах.
Высокое или низкое логическое состояние и точная синхронизация
Вы когда-нибудь задумывались над тем, как именно мы решаем, находится ли сигнал в состоянии высокого или низкого логического уровня? В несимметричных системах мы должны учитывать напряжение питания, пороговые характеристики схемы приемника и, возможно, значение опорного напряжения. И, конечно же, существуют вариации и допуски, которые вызывают дополнительную неопределенность в вопросе о высоком или низком логическом уровне.
В дифференциальных сигналах определение логического состояния является более простым. Если напряжение неинвертированного сигнала выше напряжения инвертированного сигнала, то у вас высокий логический уровень. Если неинвертированное напряжение ниже инвертированного напряжения, то у вас низкий логический уровень. Переход между этими двумя состояниями – это точка, в которой пересекаются неинвертированный и инвертированный сигналы, т.е. точка пересечения.
Это одна из причин, из-за которой важно согласовывать длины проводов или трасс, передающих дифференциальные сигналы. Для максимальной точности синхронизации необходимо, чтобы точка пересечения точно соответствовала логическому переходу; но когда два проводника в паре не равны по длине, разница в задержке распространения приведет к смещению точки пересечения.
Применения
В настоящее время существует множество стандартов интерфейсов, в которых используются дифференциальные сигналы. К ним относятся следующие:
-
(Low-Voltage Differential Signaling, Низковольтная дифференциальная передача сигналов); (Current Mode Logic, логика с токовыми переключателями); ; ; ; ; ;
- высококачественный симметричный звук.
Основные технологии разводки дифференциальных проводников на печатных платах
Наконец, давайте рассмотрим основы того, как дифференциальные проводники разводятся на печатных платах. Разводка дифференциальных сигналов может быть немного сложной, но есть некоторые основные правила, которые делают процесс более простым.
Длина и согласование длин – сохраняйте их равными!
Дифференциальные сигналы (в идеале) равны по амплитуде и противоположны по полярности. Таким образом, в идеальном случае через землю не будет протекать никакой обратный ток. Это отсутствие обратного тока – хорошо, поэтому мы хотим сохранить всё как можно более идеальным, и это означает, что нам нужны одинаковые длины двух проводников в дифференциальной паре.
Чем выше время нарастания/спада вашего сигнала (не путать с частотой сигнала), тем больше вы должны следить за тем, чтобы проводники имели одинаковую длину. Ваша программа разводки печатных плат может включать в себя функцию, которая поможет вам точно отрегулировать длину проводников для дифференциальных пар. Если вам трудно достичь равной длины, то можете использовать технику «серпантина».
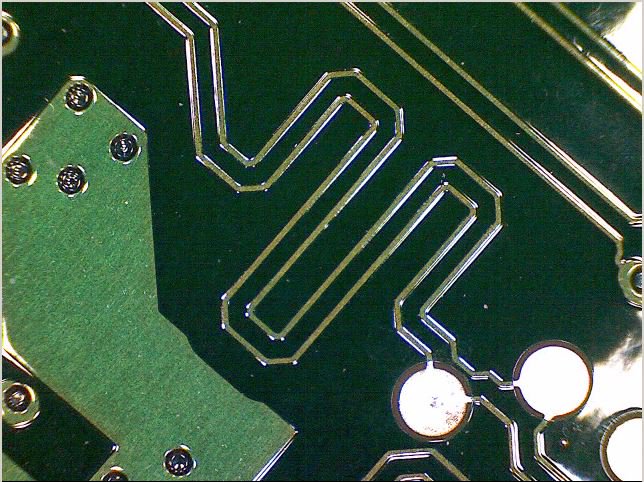 Пример серпантина проводников
Пример серпантина проводников
Ширина и интервал между проводниками – сохраняйте их постоянными!
Чем ближе дифференциальные проводники друг к другу, тем лучше будет связность сигналов. Сгенерированные электромагнитные помехи будут более эффективно компенсироваться, а принимаемые электромагнитные помехи будут более равномерно накладываться на оба сигнала. Поэтому старайтесь разводить проводники ближе друг к другу.
Вы должны разводить проводники дифференциальной пары как можно дальше от соседних сигналов, чтобы избежать помех. Ширина и расстояние между вашими проводниками должны выбираться в соответствии с целевым импедансом и должны оставаться постоянными по всей длине проводников. Поэтому, если это возможно, эти проводники должны оставаться параллельными, пока они проходят по печатной плате.
Импеданс – сведите изменения к минимуму!
Одной из наиболее важных вещей, которые необходимо сделать при проектировании печатной платы с дифференциальными сигналами, является выяснение целевого импеданса для вашего приложения, а затем разводка в соответствии с ним ваших дифференциальных пар. Кроме того, сохраняйте изменения импеданса минимальными, насколько возможно.
Импеданс вашей дифференциальной линии зависит от таких факторов, как ширина проводника, связь между проводниками, толщина меди, материал и слои печатной платы. Рассмотрите каждый из них, чтобы избежать чего-либо, что изменит импеданс вашей дифференциальной пары.
Не разводите высокоскоростные сигналы через разрывы между медными областями на слое металлизации, так как это также влияет на импеданс. Старайтесь избегать разрывов на слоях земли.
Рекомендации к компоновке – прочитайте, проанализируйте и обдумайте их!
И последнее, но не менее важное: есть одна очень важная вещь, которую вы должны выполнить при разводке дифференциальных проводников: найдите техническое описание и/или примечания к применению микросхемы, которая отправляет или принимает дифференциальный сигнал, прочитайте рекомендации по компоновке и проанализируйте их. Таким образом, вы сможете реализовать наилучшую возможную компоновку платы в рамках ограничений конкретного проекта.
Заключение
Дифференциальная передача сигналов позволяет передавать информацию с более низкими напряжениями, хорошим отношением сигнал/шум, улучшенной помехоустойчивостью к шуму и с более высокими скоростями передачи данных. С другой стороны, увеличивается количество проводников, и система будет нуждаться в специализированных передатчиках и приемниках вместо стандартных цифровых микросхем.
В настоящее время дифференциальные сигналы являются частью многих стандартов, в том числе LVDS, USB, CAN, RS-485 и Ethernet, и поэтому мы должны быть знакомы с этой технологией. Если вы разрабатываете печатную плату с дифференциальными сигналами, не забудьте ознакомиться с соответствующими техническими описаниями и примечаниями к применению и, если необходимо, снова прочитать эту статью!
Что такое диф пара
РАЗВОДКА ДИФФЕРЕНЦИАЛЬНЫХ ПАР
Дифференциальные пары работают только тогда превосходно, если они не взаимодействуют с другими сигналами. Однако компромиссные решения при трассировке позволяют применять плотную разводку трасс.
Традиционные понятия о параллельных интерфейсных потоках начинают не выполняться при скорости выше 200 МГц из-за взаимодействия сигналов большого количества шин, требующегося для передачи огромного объема информации. Решением этой проблемы является применение последовательных интерфейсов, использующих передачу сигналов в дифференциальном виде и обеспечивающих необходимую скорость потока. Дифференциальная передача сигналов, кроме того, обеспечивает значительно более низкий уровень излучения, сокращает количество выводов устройств и сигнальных шин и предоставляет возможность передавать сигналы на относительно большие расстояния.
Что это означает для разработчика печатных плат? Очевидно, новый набор требований к дизайну. Эти требования сосредоточиваются вокруг разводки двух проводников рядом друг с другом, но это не так просто, как может показаться вначале. Имеется масса теоретических материалов, но реальность может преподносить сюрпризы, по крайней мере в том, что касается требований, выдвигаемых к печатной плате.
Дифференциальная передача сигналов подразумевает передачу одинаковой информации по двум проводникам. При этом используются две шины, как минимум один передатчик (драйвер) с выходами позитивного и негативного сигналов и по одному приемнику (ресиверу) на каждый сигнал. Драйвер передает сигналы инверсно друг другу. В то время как позитивный выходной сигнал, совпадающий по фазе с входным сигналом драйвера, переходит из низкого уровня в высокий, негативный выходной сигнал, инверсный входному, переходит из высокого уровня в низкий. На рисунке 1 показаны два выходных сигнала драйвера и дифференциальный сигнал, вычисляемый как разность между позитивным и негативным сигналами. Вычитание сигналов друг из друга происходит в дифференциальном ресивере.
Нет недостатка мнений экспертов по терминологии, как необходимо говорить: «синфазный сигнал» (common mode), «сигнал при дифференциальном включении» (differential mode) и даже «сигнал нечетной волны» (odd-mode). Говоря по-простому, огромный теоретический выигрыш дифференциальной пары происходит при использовании равных противофазных сигналов, передаваемых по двум проводникам. Это предполагает, что проводники располагаются настолько близко друг к другу, что электрическая энергия, излучаемая каждым проводником, может быть воспринята другим (т.е. существуют взаимосвязь и взаимовлияние). Основные преимущества от применения равных противофазных сигналов, передающихся по близко расположенным проводникам, следующие:
1. Защищенность от шума. Любой шум, наводящийся на один из проводников, будет в такой же мере наводиться и на другой проводник. Поскольку одинаковый шум в этом случае будет присутствовать в обоих сигналах, то этот шум устраняется в разностном (дифференциальном) сигнале.
2. Нечувствительность к опорному напряжению. В дифференциальном сигнале всегда присутствует некоторый опорный уровень, позволяющий использовать его в случае, когда передатчик и приемник имеют различные общие напряжения питания (различные земли). Это также позволяет решить проблемы, связанные с нестабильностью напряжений общих выводов, и улучшить целостность сигналов.
3. Уменьшение излучаемых электромагнитных помех. Такие помехи возникают, в основном, во время переключения сигнала из одного состояния в другое. Поскольку оба дифференциальных сигнала переключаются одновременно, но противофазно, то возникающие излучения взаимно компенсируются. Кроме того, каждый из дифференциальных сигналов обычно имеет небольшую амплитуду (на рисунке 1 амплитуда составляет 0,4 В), поэтому уровень излучения также небольшой.
И последнее в теории — дифференциальный импеданс. Он определяется индивидуальным импедансом проводников пары и связью между ними.
Ниже приводится пример создания дифференциальной пары, базирующийся на требованиях некоторых текущих стандартов.
ZOD = 100 Ом ±10%. Дифференциальный импеданс, являющийся одним из основных факторов. Индивидуальный импеданс каждого проводника также может быть специфицирован и обычно близок к 50 Ом. Расстояние между проводниками и/или ширина проводников тоже могут быть определены, но если не оговорен стек дифференциальных пар, то всегда по умолчанию используется значение дифференциального импеданса.
Проводники пары должны быть подобраны по длине с точностью 0,635 мм (0,025 дюйма). Более точное значение не играет особой роли, но может быть уменьшено при передаче сигналов с большой скоростью. Таким образом, проводники каждой пары должны быть согласованы по длине.
Расстояние между разными сигналами должно быть не менее 0,508 мм (0,020 дюйма). Это расстояние между одним из проводников дифференциальной пары и проводником, по которому передается другой сигнал. Необходимо увеличивать расстояние между двумя дифференциальными парами настолько, насколько возможно.
Проводники тактового сигнала и группового сигнала данных должны быть подобраны по длине с точностью 6,35 мм (0,250 дюйма). Более точное значение также не играет особой роли и зависит от скорости передачи. В зависимости от приложения, длина одних дифференциальных пар группового сигнала может отличаться от длины других пар этой же группы. (Под групповым сигналом здесь понимается несколько дифференциальных пар, объединенные одним тактовым сигналом и передающие схожую информацию.)
Поддержание постоянного опорного напряжения. Иногда это означает удержание группового сигнала на одном слое с одним опорным напряжением. Дополнительные требования могут также предполагать ограничения в переходах на другие слои.
Таким образом, необходимо располагать проводники дифференциальной пары настолько близко друг к другу, насколько это возможно, и поддерживать постоянным дифференциальный импеданс. Все это выглядит логично и нет смысла в более подробных описаниях, правилах и математических выкладках, чтобы возвращаться к этому. И, естественно, чтобы сигналы были на самом деле дифференциальными (т.е. равными и противофазными). Теория обычно рассматривает дифференциальные проводники в виде витых пар с сильной взаимосвязью, тогда как при типичном значении дифференциального импеданса 100 Ом для печатных плат взаимосвязь мала. В этом основное отличие.
На рисунке 2 показано типичное сечение дифференциальной пары с импедансом 100 Ом.
Предполагая возможные вопросы, попробуем пересмотреть теоретические выгоды от применения дифференциальных сигналов. С точки зрения защищенности от внешнего шума, важна не связь между шинами, а взаимное расположение шин, т.е. расстояние между ними. Чем меньше это расстояние, тем становится более одинаковым воздествие сигнала-агрессора на обе шины. Реальное уменьшение перекрестных помех возможно лишь при удалении источника шума. Оказываемое воздействие зависит от квадрата расстояния между проводником агрессора и сигнальным проводником. Выигрыш от нечувствительности к опорному напряжению в большей степени зависит от качественных показателей интегральных схем и не зависит от связи между дифференциальными шинами.
И последний пункт, который может вызвать замешательство. Дифференциальные сигналы могут использоваться в ситуации, когда передатчик и приемник используют совершенно различные общие напряжения питания. Однако рекомендуется поддержание постоянного опорного напряжения. В этом случае возникает противоречие между теорией и реальностью, но иногда то, что получается, немного не вписывается в теорию.
Возвратимся к теории снова. Дифференциальная передача подразумевает использование двух равных противофазных сигналов по двум проводникам. Эти комплементарные сигналы формируются драйвером. Что же надо делать, чтобы эти сигнала оставались одинаковыми? Их симметрия есть ключ ко всему. Теория ничего не говорит о скорости сигналов и, в особенности, о о скорости нарастания их фронтов. Если бы эти сигналы были однопроводными, то тогда их импеданс и нагрузка для согласования были бы главными критериями.
И опять обратимся к теории, но с другой стороны. Если симметрия дифференциальных трасс настолько важна, то становится чрезвычайно важным одинаковая длина проводников. Это более важно, чем просто статическая проверка; сигналы должны сохранять фазовое соотношение (180°) на протяжении всей длины. Максимально возможная разводка проводников пары на одном слое и минимальное количество переходов на другие слои также способствуют увеличению симметрии. Расстояние от пары до других сигналов влияет на возможный наведенный шум, но взаимосвязь также играет существенную роль для уменьшения восприимчивости к наводкам.
Оставшееся касается того, что обычно дифференциальные сигналы передаются на достаточно высокой скорости. Дифференциальный импеданс определяет оконечную нагрузку линии передачи. Это же является справедливым и для базового опорного уровня. Все, рассмотренное выше, а также качество взаимосвязи гарантирует, что электромагнитные помехи будут минимальными.
Как все сказанное ранее перевести в разводку проводников? Общее количество трасс равно удвоенному числу сигналов, но часто общий интерфейс имеет уменьшенное количество сигналов. Это может дать небольшое послабление при разводке сложной печатной платы. К тому же, сигналы пары следует рассматривать, как одно целое. Дифференциальный импеданс обусловливает ширину проводников и расстояние между ними, но стратегия разводки должна полностью базироваться на симметрии проводников пары на всей длине от драйвера до ресивера.
Правила разводки должны применяться не только к базовым понятиям (ширина проводников и расстояние между ними и между парой и другим сигналом), но и к комплексным вопросам. На рисунке 3 показаны две дифференциальные пары. После проверки DRC (design rules check) слева отмечены несвязанные проводники, а справа сигналы двух связанных трасс не согласованы по фазе.
Если имеется возможность, то в процессе разводки должны тестироваться длины отрезков проводников пары между контрольными точками, чтобы сигналы, передающиеся по ним, имели одинаковую фазовую задержку. Если такой возможности нет, необходимо производить общую проверку длин проводников от начала до конца. Комплементарные сигналы (рис. 1) должны приходить к приемнику в одно и то же время. Если же какой-либо сигнал (позитивный или негативный) имеет задержку или опережение относительно другого сигнала, то это говорит о том, что дифференциальная пара не оптимизирована и на нее может оказываться сильное воздействие извне (амплитудное или временное).
На рисунке 4 показана плохая разводка дифференциальных сигналов. Использование углов в 45° более предпочтительно, чем углов в 90°, при которых создается большая разница в длине дифференциальных трасс и происходит некоторая потеря взаимосвязи между ними. Другая ошибка в этом примере состоит в переходе одной из трасс на другой слой, что приводит к еще большей потери взаимосвязи. Неидеальность вполне допустима, но количество элементов, приводящих к ней, должно быть сокращено до минимума.
Когда требуется развести сложную печатную плату с большим количеством различных групп дифференциальных пар, то может оказаться лучше в первую очередь разводить и оптимизировать пары, к которым предъявляются одинаковые требования (правила). Допуск по длине пар внутри одной группы может превышать допуск по длине проводников отдельно взятой пары пары. Таким образом, приоритет разводки пары выше приоритета разводки группы. Идеально, если применяется интерактивная разводка, предоставляющая обратную связь в динамике и помогающая процессу разводки.
Перевод статьи
Dennis Nagle
ROUTING DIFFERENTIAL PAIRS
Printed Circuit Design & Manufacture
August 2003
Дифференциальная передача данных
Низковольтная дифференциальная передача сигналов (англ. low-voltage differential signaling или LVDS) — способ передачи электрических сигналов, позволяющий передавать информацию на высоких частотах при помощи дешёвых соединений на основе медной витой пары.
Принцип работы:
При дифференциальной передаче для передачи одного сигнала используется дифференциальная пара (сигналов); это означает, что передающая сторона подаёт на проводники пары различные уровни напряжения, которые сравниваются на приёмной стороне: для декодирования информации используется разница напряжений на проводниках пары. Передатчик направляет небольшой ток (порядка 3,5 мА) в один из сигнальных проводников, в зависимости от того, какой логический уровень надо передать. На приёмной стороне ток проходит через резистор сопротивлением 100—120 Ом (равным волновому сопротивлению кабеля для уменьшения отраженного сигнала) и возвращается к отправителю сигнала по другому проводнику, образуя таким образом замкнутую электрическую цепь. В соответствии с законом Ома напряжение на резисторе будет составлять около 350 мВ. Принимающая сторона определяет полярность этого напряжения для того, чтобы определить логический уровень. Такой тип передачи называется токовая петля.
Небольшая амплитуда сигнала LVDS, а также высокая электромагнитная связь проводов дифференциальной пары друг с другом позволяют уменьшить излучаемые вовне помехи и рассеиваемую мощность.
Синфазное напряжение (среднее напряжение двух проводников) обычно составляет около 1,25 В, что позволяет использовать LVDS во многих СБИС с напряжением питания 2,5 В и ниже. Как упоминалось выше, напряжение между проводниками пары составляет 350 мВ, что позволяет по сравнению с другими способами передачи сигналов значительно снизить потребляемую мощность. Например, статическая мощность, рассеиваемая на нагрузочном резисторе LVDS, составляет всего 1,2 мВт, по сравнению с 90 мВт, рассеиваемыми на нагрузочном резисторе интерфейса RS-422. Без нагрузочного резистора для каждого бита данных приходилось бы нагружать и разгружать весь проводник. Использование нагрузочного резистора и высоких частот передачи приводит к тому, что бит покрывает лишь часть проводника (в процессе передачи со скоростью электромагнитных колебаний в среде), что является более энергоэффективным.
Шина LVDS
Когда скорости последовательной передачи не хватает, данные могут передаваться параллельно по нескольким парам LVDS для каждого бита или байта (например, как в PCI Express или в HyperTransport). Такая система называется шиной LVDS (англ. bus LVDS, BLVDS). Стандартные передатчики рассчитаны на использование в соединениях точка-точка, но для использования в многоточечных шинных системах модифицированные передатчики имеют большие выходные токи, которые могут нагружаться резисторами нескольких приёмников.
Величина уровне примерно 0,35В
LVDS — не единственная используемая дифференциальная система. Но она остается единственной, сочетающей в себе высокие скорости и небольшое рассеивание энергии.
Шина LVDS используется сегодня для передачи информации от скаляра (графического процессора) к матрице.