Пример 3. Построение ортонормированного базиса
Построить ортонормированный базис подпространства пространства  натянутого на систему векторов
натянутого на систему векторов
 и
и
Решение.Нам требуется построить ортонормированный базис евклидова пространства которое является линейной оболочкой векторов
которое является линейной оболочкой векторов
 Применим к этим векторам процесс ортогонализации.
Применим к этим векторам процесс ортогонализации.
Вначале возьмём  Вектор
Вектор будем искать в виде
будем искать в виде Из условия перпендикулярности
Из условия перпендикулярности получаем:
получаем: Следовательно,
Следовательно, Далее, следующий базисный вектор будем искать в виде
Далее, следующий базисный вектор будем искать в виде Из условий
Из условий и
и получаем:
получаем: и
и
Отсюда  Таким образом, ортогональный базис пространства
Таким образом, ортогональный базис пространства таков:
таков:

 Ортонормированный базис получится, если мы разделим каждый вектор на его длину:
Ортонормированный базис получится, если мы разделим каждый вектор на его длину:
Пример.4 Дополнение системы векторов до ортогонального базиса.
Убедиться в том, что векторы 
 ортогональны, и дополнить систему этих векторов до ортогонального базиса.
ортогональны, и дополнить систему этих векторов до ортогонального базиса.
Решение.Проверим ортогональность. Имеем: Следовательно,
Следовательно, Таким образом, мы можем положить
Таким образом, мы можем положить
 Другие векторы
Другие векторы ортогонального базиса удовлетворяют условиям
ортогонального базиса удовлетворяют условиям и
и Пусть
Пусть Условие
Условие даёт систему
даёт систему
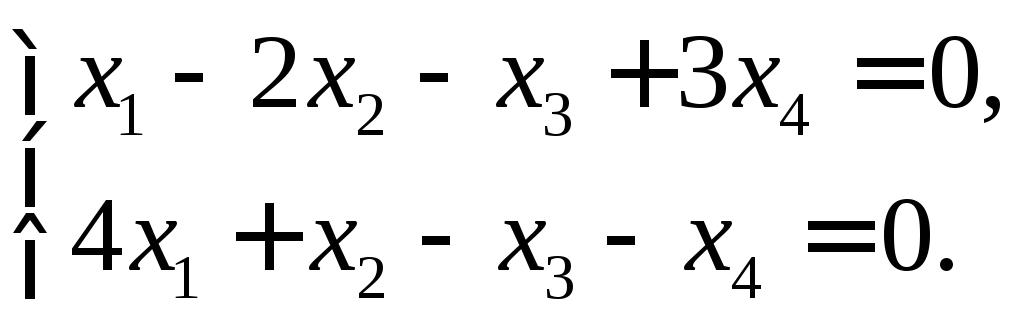
Найдём фундаментальную систему решенийэтой системы. Вычтем из второго уравнения первое, умноженное на 4: Перенесём
Перенесём в правую часть:
в правую часть: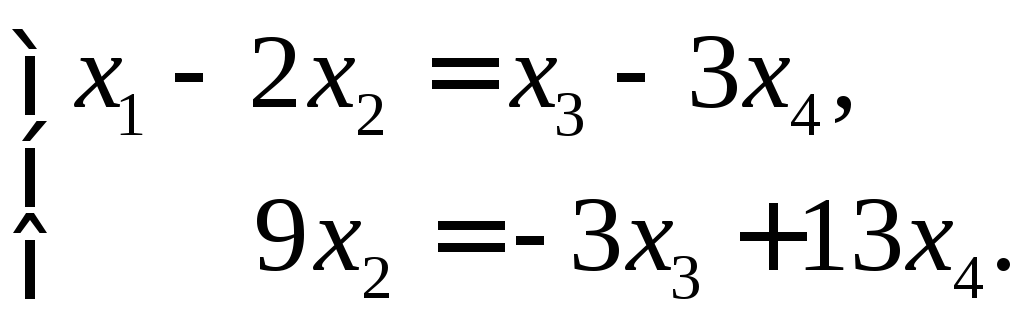 Переменные
Переменные здесьсвободные, а переменные
здесьсвободные, а переменные –связанные. Придадим свободным переменным значения: вначале
–связанные. Придадим свободным переменным значения: вначале
 затем
затем
 и найдём
и найдём Составим таблицу:
Составим таблицу:
104. Построение ортонормированного базиса из собственных векторов самосопряженного оператора
1) Составить характеристическое уравнение линейного оператора |A — l.E| = 0.
2) Найдем все корни характеристического уравнения.
3) Вычислим собственные векторы линейного оператора A, решая матричное уравнение (A — l.E)X=0.
4) Ортонормируем, полученный базис.
Пример. Линейный оператор A, действующий в евклидовом пространстве Е3, имеет в ортонормированном базисе E1, E2, E3 матрицу
 .
.
Найти в Е3 ортонормированный базис из собственных векторов оператора A и составить матрицу оператора A в этом базисе.
Решение. 1) Составить характеристическое уравнение линейного оператора |A — l.E| = 0.

2) Найдем все корни характеристического уравнения: l1=-1, l2 = l3 = 1. Тогда матрица линейного оператора в ортонормированном базисе, составленном из собственных векторов имеет вид
 .
.
3) Вычислим собственные векторы линейного оператора A, решая матричное уравнение (A — l.E)X=0.
Пусть l1=-1. Матричное уравнение (A — l1E)X=0 принимает вид:

Решая систему, находим решение X = C(1,-2,1), C€R.
Пусть l2 = l3 = 1. Матричное уравнение (A — l1E)X=0 принимает вид:

Решая систему, находим решение X = C1(2,1,0) + C2(-1,0,1), C€R.
4) Ортонормируем, полученный базис.
A1 = (1,-2,1), A2 = (2,1,0), A3 =(-1,0,1).
B1 = (1,-2,1), B2 = (2,1,0), B3 = A3 + k b2,  , b3 =(-1/5, 2/5, 1/5).
, b3 =(-1/5, 2/5, 1/5).
 .
.
линейная-алгебра — Построить ортонормированный базис подпространства
Применяя процесс ортогонализации, построить ортонормированный базис подпространства, натянутый на заданную систему векторов.
Возьмем такое $%a_1=X_1; a_1=(1,2,2,-1).$%
Пронормировав векторы $%a_1,a_2,a_3$% получим искомый ортонормированный базис:
задан 1 Апр ’16 23:48
@Koval: давайте начнём с исправления ошибок, а потом будем обсуждать дальше. В 4-й строке (начинающейся со слова «Возьмём») есть ошибка. Найдите её и исправьте. Также проверьте, не повлияла ли она на всё остальное. И ещё маленький технический совет. При нахождении $%a_2$% у Вас подробно расписана дробь $%\frac<1+2-10-3><10>$%. Это хорошо, так как читатель должен понимать, откуда она взялась. Но далее он легко способен сосчитать то, что в числителе, и разделить 10 на 10. Поэтому следующая дробь $%\frac<10><10>$% выглядит уже излишеством, и там коэффициент писать в таком виде не надо.
@Koval: сам метод такой и должен быть, то есть первый вектор берётся из старого списка. Ошибка не в этом, а в третьей координате, у которой Вы добавили минус, которого не было.
@Koval: у Вас там пропущено одно из слагаемых. Если его добавить, что окажется, что $%a_4=0$%. Это значит, что исходная система была линейно зависима (такое в задачах нередко бывает). Тогда базис будет состоять из трёх векторов $%a_1,a_2,a_3$%. Он ортогонален, и для ортонормированности останется каждый из этих векторов разделить на его длину.
@falcao почему мы не запишем просто $%e_4=(0,0,0,0)?$%
@Koval: потому что базис — это линейно независимая система, и нулевой вектор в его состав входить не может.
Ортогональный и ортонормированный базисы евклидова пространства
Так как евклидово пространство является линейным, на него переносятся все понятия и свойства, относящиеся к линейному пространству, в частности, понятия базиса и размерности.
Базис [math]\mathbf
Базис [math]\mathbf
Теорема 8.5. В конечномерном евклидовом пространстве любую систему ортогональных (ортонормированных) векторов можно дополнить до ортогонального (ортонормированного) базиса.
В самом деле, по теореме 8.2 любую систему линейно независимых векторов, в частности, ортогональную (ортонормированную), можно дополнить до базиса. Применяя к этому базису процесс ортогонализации, получаем ортогональный базис. Нормируя векторы этого базиса (см. пункт 4 замечаний 8.11), получаем ортонормированный базис.
Выражение скалярного произведения через координаты сомножителей
Пусть [math]\mathbf
Выразим скалярное произведение, используя следствие 3 из аксиом скалярного произведения:
Преобразуем это выражение, используя операции с матрицами:
y=\begin
которая называется матрицей Грама системы векторов [math]\mathbf
Преимущества ортонормированного базиса
Для ортонормированного базиса [math]\mathbf
1. В ортонормированном базисе [math]\mathbf
2. В ортонормированном базисе [math]\mathbf
3. Координаты [math]x_1,\ldots,x_n[/math] вектора [math]\mathbf
В самом деле, умножая обе части равенства [math]\mathbf
Аналогично доказываются остальные формулы.
Изменение матрицы Грама при переходе от одного базиса к другому
Пусть [math](\mathbf
По формуле (8.32) вычислим скалярное произведение векторов [math]\mathbf
где [math]\mathop
Отсюда следует формула изменения матрицы Грама при переходе от одного базиса к другому :
Записав это равенство для ортонормированных базисов [math](\mathbf
Свойства определителя Грама
Определитель матрицы (8.33) называется определителем Грама. Рассмотрим свойства этого определителя.
1. Критерий Грама линейной зависимости векторов: система векторов [math]\mathbf
Действительно, если система [math]\mathbf
Умножая это равенство скалярно на [math]\mathbf
Следствие. Если какой-либо главный минор матрицы Грама равен нулю, то и определитель Грама равен нулю.
Главный минор матрицы Грама системы [math]\mathbf
2. Определитель Грама [math]\det
Действительно, в процессе ортогонализации по векторам [math]\mathbf
После первого шага определитель Грама не изменяется
Выполним с определителем [math]\det G(\mathbf
Так как при этих преобразованиях определитель не изменяется, то
Значит, после второго шага в процессе ортогонализации определитель не изменяется. Продолжая аналогично, получаем после [math]k[/math] шагов:
Вычислим правую часть этого равенства. Матрица [math]G(\mathbf
3. Определитель Грама любой системы [math]\mathbf
Докажем неотрицательность определителя Грама. Если система [math]\mathbf
Оценим теперь скалярный квадрат [math]\langle \mathbf
Следовательно, по свойству 2 имеем
1. Матрица Грама любой системы векторов является неотрицательно определенной, так как все ее главные миноры также являются определителями Грама соответствующих подсистем векторов и неотрицательны в силу свойства 3.
2. Матрица Грама любой линейно независимой системы векторов является положительно определенной, так как все ее угловые миноры положительны (в силу свойств 1,3), поскольку являются определителями Грама линейно независимых подсистем векторов.
3. Определитель квадратной матрицы [math]A[/math] (n-го порядка) удовлетворяет неравенству Адамара :
Действительно, обозначив [math]a_1,a_2,\ldots,a_n[/math] столбцы матрицы [math]A[/math] , элементы матрицы [math]A^TA[/math] можно представить как скалярные произведения (8.27): [math]\langle a_i,a_j\rangle= (a_i)^Ta_j[/math] . Тогда [math]A^TA=G(a_1,a_2,\ldots,a_n)[/math] — матрица Грама системы [math]a_1,a_2,\ldots,a_n[/math] векторов пространства [math]\mathbb
4. Если [math]A[/math] — невырожденная квадратная матрица, то любой главный минор матрицы [math]A^TA[/math] положителен. Это следует из пункта 2, учитывая представление произведения [math]A^TA=G(a_1,\ldots,a_n)[/math] как матрицы Грама системы линейно независимых векторов [math]a_1,\ldots,a_n[/math] — столбцов матрицы [math]A[/math] (см. пункт 3).
Изоморфизм евклидовых пространств
Два евклидовых пространства [math]\mathbb
где [math](\cdot,\cdot)[/math] и [math](\cdot,\cdot)'[/math] — скалярные произведения в пространствах [math]\mathbb
Напомним, что для изоморфизма конечномерных линейных пространств необходимо и достаточно, чтобы их размерности совпадали (см. теорему 8.3). Покажем, что это условие достаточно для изоморфизма евклидовых пространств (необходимость следует из определения). Как и при доказательстве теоремы 8.3, установим изоморфизм n-мерного евклидова пространства [math]\mathbb
(\mathbf
(см. пункт 1 преимуществ ортонормированного базиса). Такое же выражение дает скалярное произведение (8.27) координатных столбцов [math]x[/math] и [math]y[/math] , т.е. скалярные произведения соответствующих элементов равны
Следовательно, евклидовы пространства [math]\mathbb
Таким образом, изучение конечномерных евклидовых пространств может быть сведено к исследованию вещественного арифметического пространства [math]\mathbb