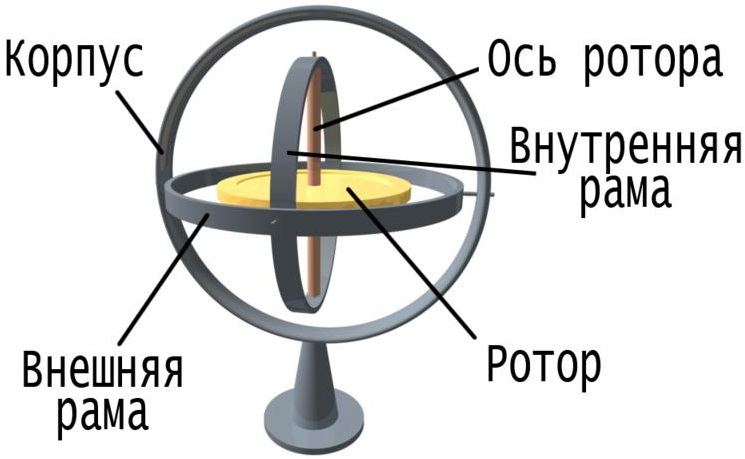
Билет 17. Гироскопы. Гироскоп под действием сил ( приближенная теория). Прецессия гироскопа. Гироскопические силы. Нутации.
Момент количества движения гироскопа совпадает с его осью вращения. Для того, чтобы изменить направление в пространстве оси гироскопа, т.е. направление вектора необходимо в соответствие основным уравнением динамики вращательного движения подействовать на него моментом внешних сил . Пусть это пара сил создающая вращающий момент относительно оси , лежащей в плоскости чертежа перпендикулярно оси ОО (вращение вокруг ). При этом наблюдается следующее явление, получившее название гироскопического эффекта: под действием пары сил, которые, казалось бы, должны были вызвать поворот оси гироскопа ОО вокруг оси , ось гироскопа поворачивается вокруг прямой перпендикулярно к этим осям (т.е. к ОО и ). «Противоестественное» на первый взгляд поведение гироскопа оказывается, как легко видеть, полностью соответствует законам динамики вращательного движения, т.е. в конечном счете, законам Ньютона. Рассмотрим поведение гироскопа под действием момента силы действующего вдоль оси . За время момент количества движения гироскопа получит приращение , которое имеет такое же направление, как и . Момент количества движения гироскопа спустя время будет равен результирующей , лежащей в плоскости чертежа. Направление вектора совпадает с новым направлением оси вращения гироскопа. Таким образом, ось гироскопа повернется вокруг оси (перпендикулярной плоскости чертежа), причем так, что угол между векторами и уменьшится: Если действовать на гироскоп длительное время постоянным по направлению моментом внешних сил, то ось гироскопа устанавливается в конце концов так, что ось и направление собственного вращения совпадают с осью и направлением вращения под действием внешних сил (вектор , совпадает по направлению с вектором ).
Прецессией называется вращение оси гироскопа в горизонтальной плоскости под действием момента внешней силы.
Главное свойство прецессии — безинерционность: как только сила, вызывающая прецессию волчка, пропадёт, прецессия прекратится, а волчок займёт неподвижное положение в пространстве.
Можно получить эффект прецессии, не дожидаясь замедления вращения волчка: толкните его ось (приложите силу) — начнётся прецессия. С прецессией напрямую связан другой эффект, также показанный на иллюстрации — это нутация — колебательные движения оси прецессирующего тела. Скорость прецессии и амплитуда нутации связаны со скоростью вращения тела (изменяя параметры прецессии и нутации в случае, если есть возможность приложить силу к оси вращающегося тела, можно изменить скорость его вращения).
Нутацией называется вращение оси гироскопа в вертикальной плоскости (« нырки» при вращении)
Свободным называется гироскоп, к которому не приложен внешний момент сил. Свободный гироскоп не изменяет направления своей оси, если ось вращения совпадает с геометрической осью гироскопа ( т.е. не прецессирует)
Прецессия и нутация гироскопа
Прецессия гироскопа — такой тип движения, когда в результате постоянного действия момента внешней силы ось свободного гироскопа вращается вокруг направления данной внешней силы.
Известно, что прецессия обеспечивает устойчивость движения. Пример прецессии — движение оси детской игрушки — юлы с заостренным

Рис. 6.5. Пример гироскопа с одной точкой опоры — детская юла
концом (рис. 6.5), т.е. гироскопа, имеющего одну точку опоры. Юла, раскрученная вокруг своей оси и поставленная на горизонтальную плоскость слегка наклонно, начинает прецессировать вокруг вертикальной оси под действием момента пары сил тяжести и нормальной реакции опоры: М = / х mg , где / = ОС . Конец оси гироскопа будет двигаться в направлении вектора м , который лежит в горизонтальной плоскости и направлен перпендикулярно оси юлы.
Скорость, с которой ось вращения гироскопа движется относительно вертикальной оси, называется угловой скоростью прецессии Q.
Можно доказать, что для вращающегося волчка угловая скорость прецессии не зависит от угла наклона волчка 0; она обратно пропорциональна моменту импульса волчка:

Чем быстрее вращается волчок, тем больше момент импульса и тем медленнее он прецессирует. Причем мгновенное исчезновение момента силы, например тяжести, приводит к мгновенному же исчезновению прецессии, т.е. прецессионное движение является безынерционным.
Если рассматривать качение наклонного диска, то на него будет действовать опрокидывающий момент сил тяжести и реакции опоры. Легкий диск упадет значительно быстрее, чем массивный, из-за малого значения момента импульса (скорость прецессии больше).

Рис. 6.6. Движение конца оси гироскопа, сопровождаемое нутациями
Рассмотрим случай, когда прецессия гироскопа, который движется под действием силы тяжести, сопровождается нутациями — колебаниями оси собственного вращения гироскопа вокруг вектора полного момента импульса. На рис. 6.6 показано, как в результате наложения нутаций на прецессионное движение вершина гироскопа описывает сложную траекторию с переменным углом нутации 0. Ось конуса нутации совпадает по направлению с вектором L и движется вместе с ним. Вершина конуса нутации, как и вершина конуса прецессии, находится в неподвижной точке О — точке закрепления гироскопа.
Чем быстрее вращается гироскоп, тем больше угловая скорость нутации и тем меньше ее амплитуда и период. При очень быстром вращении нутации делаются практически незаметными для глаза. Отметим, что из- за трения нутационные колебания быстро затухают и затем гироскоп совершает только прецессионное движение, когда угол 0 между векторами L ий остается постоянным. Если во время движения гироскопа нутация отсутствует и величины угловой скорости прецессии Q и угловой скорости вращения вокруг собственной оси ш постоянны, то такое движение называется регулярной прецессией (равномерной).
Впервые доказательства вращения Земли вокруг своей оси с запада на восток были получены французским физиком Ж.-Б.-Л. Фуко с помощью маятника Фуко (1851) и в экспериментах с гироскопом на кардано- вом подвесе (1852). Первый в Беларуси маятник Фуко был установлен в Белорусском государственном педагогическом университете им. Максима Танка (сентябрь 2004 г., Минск).
Свойствами гироскопов обладают вращающиеся небесные тела, винты самолетов и т.д. Области практического применения гироскопов динамично расширяются. Например, гироскопические устройства и приборы применяются в медицине, в ракетной и космической технике, для целей навигации (указатели стран света, горизонта и др.), при проведении топографических и геодезических работ, строительстве метрополитенов.
Что называется нутацией гироскопа
Опыт показывает, что прецессионное движение гироскопа под действием внешних сил в общем случае сложнее, чем то, которое было описано выше в рамках элементарной теории. Если сообщить гироскопу толчок, изменяющий угол (см. рис. 4.6), то прецессия перестанет быть равномерной (часто говорят: регулярной), а будет сопровождаться мелкими вращениями и дрожаниями вершины гироскопа — нутациями. Для их описания необходимо учесть несовпадение вектора полного момента импульса L, мгновенной угловой скорости вращения и оси симметрии гироскопа.
Точная теория гироскопа выходит за рамки курса общей физики. Из соотношения следует, что конец вектора L движется в направлении M, то есть перпендикулярно к вертикали и к оси гироскопа. Это значит, что проекции вектора L на вертикаль и на ось гироскопа остаются постоянными. Еще одной постоянной является энергия
где — кинетическая энергия гироскопа. Выражая и через углы Эйлера и их производные, можно, с помощью уравнений Эйлера , описать движение тела аналитически.
Результат такого описания оказывается следующим: вектор момента импульса L описывает неподвижный в пространстве конус прецессии, и при этом ось симметрии гироскопа движется вокруг вектора L по поверхности конуса нутаций. Вершина конуса нутаций, как и вершина конуса прецессии, находится в точке закрепления гироскопа, а ось конуса нутаций совпадает по направлению с L и движется вместе с ним. Угловая скорость нутаций определяется выражением
где и — моменты инерции тела гироскопа относительно оси симметрии и относительно оси, проходящей через точку опоры и перпендикулярной оси симметрии, — угловая скорость вращения вокруг оси симметрии (сравн. с (3.64)).
Таким образом, ось гироскопа участвует в двух движениях: нутационном и прецессионном. Траектории абсолютного движения вершины гироскопа представляют собой замысловатые линии, примеры которых представлены на рис. 4.7.
| Рис. 4.7. |
Характер траектории, по которой движется вершина гироскопа, зависит от начальных условий. В случае рис. 4.7а гироскоп был раскручен вокруг оси симметрии, установлен на подставке под некоторым углом к вертикали и осторожно отпущен. В случае рис. 4.7б ему, кроме того, был сообщен некоторый толчок вперед, а в случае рис. 4.7в — толчок назад по ходу прецессии. Кривые на рис. 4.7 вполне аналогичны циклоидам, описываемым точкой на ободе колеса, катящегося по плоскости без проскальзывания или с проскальзыванием в ту или иную сторону. И лишь сообщив гироскопу начальный толчок вполне определенной величины и направления, можно добиться того, что ось гироскопа будет прецессировать без нутаций. Чем быстрее вращается гироскоп, тем больше угловая скорость нутаций и тем меньше их амплитуда. При очень быстром вращении нутации делаются практически незаметными для глаза.
Может показаться странным: почему гироскоп, будучи раскручен, установлен под углом к вертикали и отпущен, не падает под действием силы тяжести, а движется вбок? Откуда берется кинетическая энергия прецессионного движения?
Ответы на эти вопросы можно получить только в рамках точной теории гироскопам. На самом деле гироскоп действительно начинает падать, а прецессионное движение появляется как следствие закона сохранения момента импульса. В самом деле, отклонение оси гироскопа вниз приводит к уменьшению проекции момента импульса на вертикальное направление. Это уменьшение должно быть скомпенсировано моментом импульса, связанным с прецессионным движением оси гироскопа. С энергетическое точки зрения кинетическая энергия прецессии появляется за счет изменения потенциальной энергии гироскопам
Если за счет трения в опоре нутации гасятся быстрее, чем вращение гироскопа вокруг оси симметрии (как правило, так и бывает), то вскоре после «запуска» гироскопа нутации исчезают и остается чистая прецессия (рис. 4.8). При этом угол наклона оси гироскопа к вертикали оказывается больше, чем он был вначале то есть потенциальная энергия гироскопа уменьшается. Таким образом, ось гироскопа должна немного опуститься, чтобы иметь возможность прецессировать вокруг вертикальной оси.
| Рис. 4.8. |
Гироскопические силы.
Обратимся к простому опыту: возьмем в руки вал АВ с насаженным на него колесом С (рис. 4.9). Пока колесо не раскручено, не представляет никакого труда поворачивать вал в пространстве произвольным образом. Но если колесо раскручено, то попытки повернуть вал, например, в горизонтальной плоскости с небольшой угловой скоростью приводят к интересному эффекту: вал стремится вырваться из рук и повернуться в вертикальной плоскости; он действует на кисти рук с определенными силами и (рис. 4.9). Требуется приложить ощутимое физическое усилие, чтобы удержать вал с вращающимся колесом в горизонтальной плоскости.
| Рис. 4.9. |
Рассмотрим эффекты, возникающие при вынужденном вращении оси гироскопа, более подробно. Пусть ось гироскопа будет укреплена в U-образной раме, которая может поворачиваться вокруг вертикальной оси OO’ (рис. 4.10). Такой гироскоп обычно называют несвободным — его ось лежит в горизонтальной плоскости и выйти из нее не может.
| Рис. 4.10. |
Раскрутим гироскоп вокруг его вокруг его оси симметрии до большой угловой скорости (момент импульса L) и станем поворачивать раму с укрепленным в ней гироскопом вокруг вертикальной оси OO’ с некоторой угловой скоростью как показано на рис. 4.10. Момент импульса L, получит при этом приращение которое должно быть обеспечено моментом сил M, приложенным к оси гироскопа. Момент M, в свою очередь, создан парой сил возникающих при вынужденном повороте оси гироскопа и действующих на ось со стороны рамы. По третьему закону Ньютона ось действует на раму с силами (рис. 4.10). Эти силы называются гироскопическими; они создают гироскопический момент Появление гироскопических сил называют гироскопическим эффектом. Именно эти гироскопические силы мы и чувствуем, пытаясь повернуть ось вращающегося колеса (рис. 4.9).
Гироскопический момент нетрудно рассчитать. Положим, согласно элементарной теории, что
где — момент инерции гироскопа относительно его оси симметрии, а — угловая скорость собственного вращения. Тогда момент внешних сил, действующих на ось, будет равен
где — угловая скорость вынужденного поворота (иногда говорят: вынужденной прецессии). Со стороны оси на подшипники действует противоположный момент
Таким образом, вал гироскопа, изображенного на рис. 4.10, будет прижиматься кверху в подшипнике В и оказывать давление на нижнюю часть подшипника А.
Направление гироскопических сил можно легко найти с помощью правила, сформулированного Н.Е. Жуковским: гироскопические силы стремятся совместить момент импульса L гироскопа с направлением угловой скорости вынужденного поворота. Это правило можно наглядно продемонстрировать с помощью устройства, представленного на рис. 4.11.
| Рис. 4.11. |
Ось гироскопа закреплена в кольце, которое может свободно поворачиваться в обойме. Приведем обойму во вращение вокруг вертикальной оси с угловой скоростью (вынужденный поворот), и кольцо с гироскопом будет поворачиваться в обойме до тех пор, пока направления L и не совпадут. Такой эффект лежит в основе известного магнитомеханического явления — намагничивания железного стержня при его вращении вокруг собственной оси — при этом спины электронов выстраиваются вдоль оси стержня (опыт Барнетта).
Гироскопические усилия испытывают подшипники осей быстро вращающихся частей машины при повороте самой машины (турбины на корабле, винта на самолете и т.д.). При значительных величинах угловой скорости вынужденной прецессии и собственного вращения а также больших размерах маховика эти силы могут даже разрушить подшипники. Рассмотрим некоторые примеры проявления гироскопических сил.
Пример 1. Легкий одномоторный самолет с правым винтом совершает левый вираж (рис. 4.12). Гироскопический момент передается через подшипники А и В на корпус самолета и действует на него, стремясь совместить ось собственного вращения винта (вектор ) с осью вынужденной прецессии (вектор ). Самолет начинает задирать нос кверху, и летчик должен «дать ручку от себя», то есть опустить вниз руль высоты. Таким образом, момент гироскопических сил будет компенсирован моментом аэродинамических сил .
7.5. Гироскопы
Гироскопом называется массивное осесимметричное тело (симметричный волчок), быстро вращающееся вокруг оси симметрии, причем ось вращения может изменять положение в пространстве. Ось симметрии называется осью фигуры гироскопа.
Видео 7.6. Что же такое гироскоп?
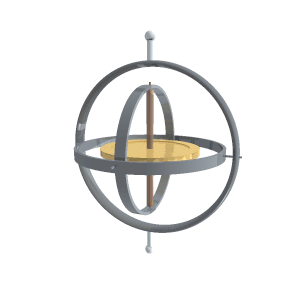
Рис. 7.17. Движение системы гироскопов
Ось симметрии является одной из главных осей гироскопа. Поэтому его момент импульса совпадает по направлению с осью вращения.
Для того, чтобы изменить положение в пространстве положение оси фигуры гироскопа, необходимо подействовать на него моментом внешних сил.
Видео 7.7. Гироскопические силы:большой гироскоп рвет веревку
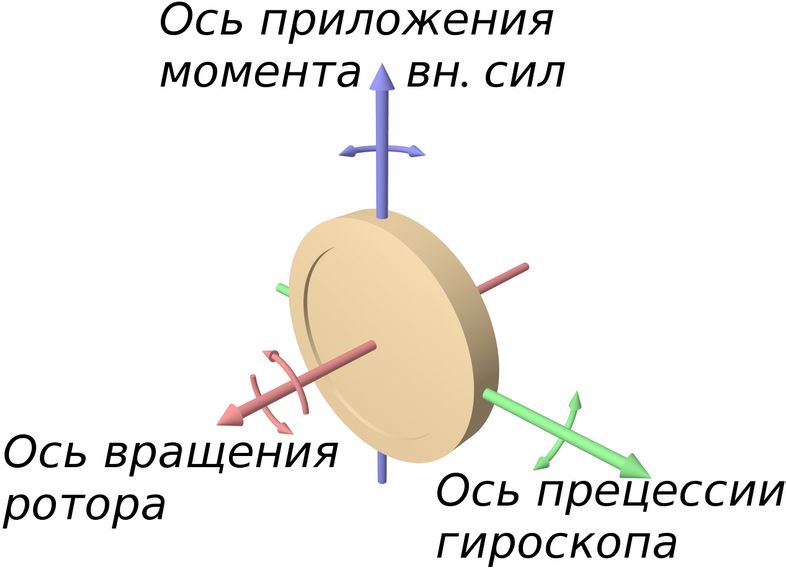
Рис. 7.18. Направление векторов при вращении гироскопа
При этом наблюдается явление, получившее название гироскопического: под действием сил, которые, казалось бы, должны были вызвать поворот оси 1 вокруг оси 2 (рис. 7.19), наблюдается поворот оси фигуры вокруг оси 3.
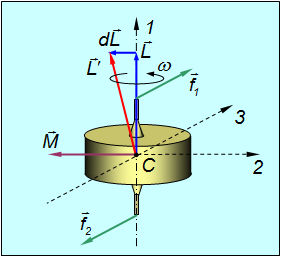
Рис. 7.19. Движение оси фигуры гироскопа под действием момента внешних сил
Видео 7.8. Гироскоп с перегрузами: направление и скорость прецессии, нутации
Гироскопические явления проявляются всюду, где имеются быстро вращающиеся тела, ось которых может поворачиваться в пространстве.
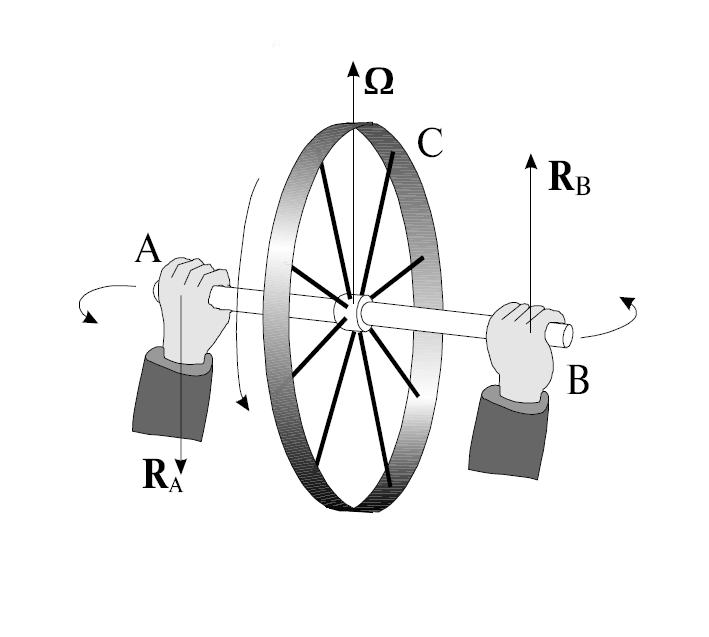
Рис. 7.20. Реакция гироскопа на внешнее воздействие
Странное на первый взгляд поведение гироскопа, рис. 7.19 и 7.20, полностью объясняется уравнением динамики вращательного движения твердого тела

Видео 7.9. «Любвеобильный» гироскоп: ось гироскопа бежит вдоль направляющей, не покидая её
Видео 7.10. Действие момента силы трения: «Колумбово» яйцо
Если гироскоп привести в быстрое вращение, он будет обладать значительным моментом импульса. Если на гироскоп будет действовать внешняя сила в течение времени  , то приращение момента импульса будет
, то приращение момента импульса будет
Если сила действует в течение короткого времени , то
Другими словами, при коротких воздействиях (толчках) момент импульса гироскопа практически не меняется. С этим связана замечательная устойчивость гироскопа по отношению к внешним воздействиям, которая используется в различных приборах, таких как гирокомпасы, гиростабилизированные платформы и т. д.
Видео 7.11. Модель гирокомпаса, гиростабилизация
Видео 7.12. Большой гирокомпас

7.21. Гиростабилизатор орбитальной станции
В гироскопах, применяющихся в авиации и космонавтике, используется карданов подвес, который позволяет сохранять направление оси вращения гироскопа независимо от ориентации самого подвеса:
Видео 7.13. Гироскопы в цирке: езда на одном колесе по проволоке
Дополнительная информация
http://www.plib.ru/library/book/14978.html Сивухин Д.В. Общий курс физики, том 1, Механика Изд. Наука 1979 г. — стр. 245–249 (§ 47): кинематическая теорема Эйлера о вращениях твердого тела вокруг неподвижной точки.
Рассмотрим движение гироскопа с неподвижной точкой опоры, как показано на на рис. 7.22.
Движение гироскопа под действием внешней силы называется вынужденной прецессией.
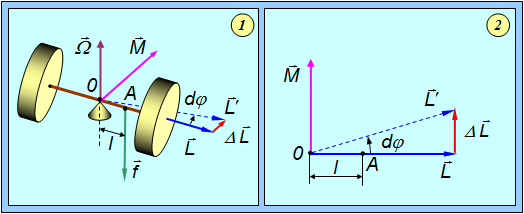
Рис. 7.22. Вынужденная прецессия гироскопа: 1 — общий вид; 2 — вид сверху
Приложим в точке А силу  . Если гироскоп не вращается, то, естественно, правый маховик будет опускаться, а левый — подниматься. Другая ситуация будет, если предварительно гироскоп привести в быстрое вращение. В этом случае под действием силы ось гироскопа будет вращаться с угловой скоростью
. Если гироскоп не вращается, то, естественно, правый маховик будет опускаться, а левый — подниматься. Другая ситуация будет, если предварительно гироскоп привести в быстрое вращение. В этом случае под действием силы ось гироскопа будет вращаться с угловой скоростью  вокруг вертикальной оси. То есть ось гироскопа приобретает скорость в направлении, перпендикулярном направлению действующей силы.
вокруг вертикальной оси. То есть ось гироскопа приобретает скорость в направлении, перпендикулярном направлению действующей силы.
Таким образом, прецессия гироскопа представляет собой движение под действием внешних сил, происходящее таким образом, что ось фигуры описывает коническую поверхность.
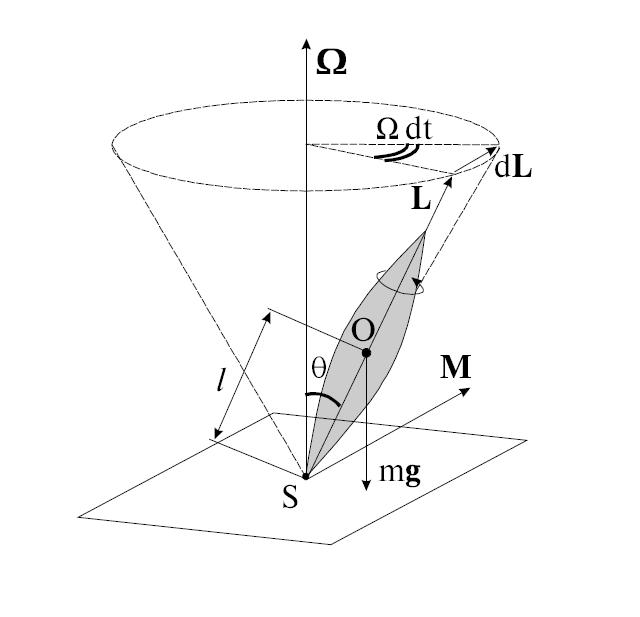
Рис. 7.23. К выводу формулы прецессии гироскопа.
Объяснение этого явления заключается в следующем. Момент силы относительно точки 0 будет

Приращение момента импульса гироскопа за время  равно
равно

Это приращение перпендикулярно моменту импульса и, следовательно, меняет его направление, но не величину.
Вектор момента импульса ведет себя подобно вектору скорости при движении частицы по окружности. В последнем случае приращения скорости  перпендикулярно скорости частицы
перпендикулярно скорости частицы  и равно по модулю
и равно по модулю


В случае гироскопа элементарное приращение момента импульса

и равно по модулю

За время вектор момента импульса повернется на угол 
Угловая скорость вращения плоскости, проходящей через ось конуса, описываемого осью фигуры, и ось фигуры, называется угловой скоростью прецессии гироскопа.
Возникающие при определенных условиях колебания оси фигуры гироскопа в плоскости, проходящей через ось указанного выше конуса и саму ось фигуры, называются нутациями. Нутации могут быть вызваны, например, коротким толчком оси фигуры гироскопа вверх или вниз (см. рис. 7.24):

Рис. 7.24. Нутации гироскопа
Угловая скорость прецессии в рассматриваемом случае равна
Отметим важное свойство гироскопа — его безынерционность, заключающееся в том, что после прекращения действия внешней силы вращение оси фигуры прекращается.
Дополнительная информация
http://www.plib.ru/library/book/14978.html Сивухин Д.В. Общий курс физики, том 1, Механика Изд. Наука 1979 г. — стр. 288–293 (§ 52): изложены основы точной теории гироскопа.
http://femto.com.ua/articles/part_1/0796.html — физическая энциклопедия. Описаны разнообразные механические гироскопы, которые используются для навигации — гирокомпасы.
http://femto.com.ua/articles/part_1/1901.html — физическая энциклопедия. Описан лазерный гироскоп для целей космической навигации.
Влияние гироскопических сил в технике иллюстрируется следующими рисунками.
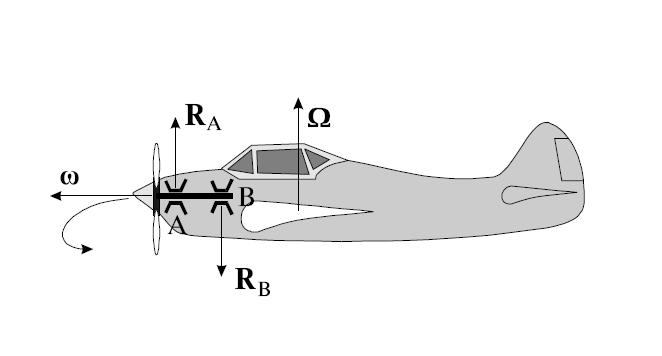
Рис. 7.25. Гироскопические силы,действующие на самолет при вращении винта
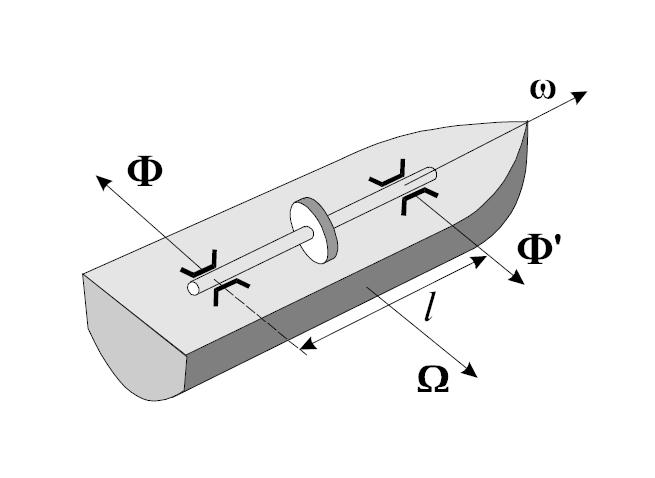
Рис. 7.26. Перевертывание волчка под действием гироскопических сил
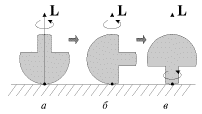
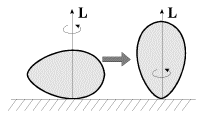
Рис. 7.27. Как поставить яйцо «на попа»
Дополнительная информация
http://www.pereplet.ru/nauka/Soros/pdf/9809_096.pdf — Соросовский образовательный журнал, 1998 г., № 9, — в статье обсуждаются проблемы динамики вращающихся тел (кельтских камней), соприкасающихся с твердой поверхностью (А.П. Маркеев).
http://ilib.mirror1.mccme.ru/djvu/bib-kvant/kvant_35.djvu — Михайлов А.А. Земля и ее вращение, Библиотечка Квант, выпуск 35 стр. 50–56 — планета Земля — большой волчок, ее ось прецессирует в пространстве.
О принципе работы колеса
Раз уж мы много говорили в этой главе о вращении тел, остановимся на самом великом и важном открытии человечества — изобретении колеса. Всем известно, что волочить груз гораздо труднее, чем перевозить его на колесах. Встает вопрос, почему? Колесо, играющее огромную роль в современной технике, по праву считается одним из гениальнейших изобретений человечества.
Передвижение груза с помощью катка. Прототипом колеса был каток, подкладываемый под груз. Его первые применения теряются во мгле веков. Прежде чем разбираться с колесом, поймем принцип действия катка. Для этого рассмотрим пример.
Пример. Груз массой M положен на цилиндрический каток массой  и радиусом
и радиусом  , который может двигаться по плоскому горизонтальному настилу. К грузу приложена горизонтальная сила
, который может двигаться по плоскому горизонтальному настилу. К грузу приложена горизонтальная сила  (рис. 7.28). Найдем ускорения груза и катка. Силой трения качения пренебречь. Считать, что движение системы происходит без проскальзывания.
(рис. 7.28). Найдем ускорения груза и катка. Силой трения качения пренебречь. Считать, что движение системы происходит без проскальзывания.
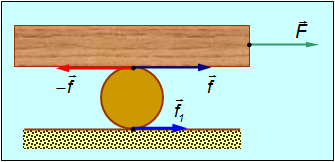
Рис. 7.28. Передвижение груза с помощью катка
Обозначим  силу трения между катком и грузом и
силу трения между катком и грузом и  — между катком и настилом. За положительное направление примем направление внешней силы . Тогда положительным значениям и соответствуют направления сил трения, показанные на рис. 7.28.
— между катком и настилом. За положительное направление примем направление внешней силы . Тогда положительным значениям и соответствуют направления сил трения, показанные на рис. 7.28.
Таким образом, на груз действуют силы и , а на каток — силы и . Обозначим a ускорение груза и a1 — ускорение катка. Кроме того, каток вращается по часовой стрелке с угловым ускорением  .
.
Уравнения поступательного движения принимают вид:
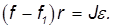
Уравнение вращательного движения катка записывается так:
Обратимся теперь к условиям отсутствия проскальзывания. Из-за вращения катка его нижняя точка имеет линейное ускорение  и, кроме того, участвует в поступательном движении с ускорением
и, кроме того, участвует в поступательном движении с ускорением  . В отсутствие проскальзывания между катком и настилом полное ускорение нижней точки катка должно быть равно нулю, так что
. В отсутствие проскальзывания между катком и настилом полное ускорение нижней точки катка должно быть равно нулю, так что

Верхняя точка катка приобретает из-за вращения противоположно направленное линейное ускорение  и то же ускорение поступательного движения. Чтобы не было проскальзывания между катком и грузом, полное ускорение верхней точки должно быть равно ускорению груза:
и то же ускорение поступательного движения. Чтобы не было проскальзывания между катком и грузом, полное ускорение верхней точки должно быть равно ускорению груза:

Из полученных уравнений для ускорений следует, что ускорение катка в два раза меньше ускорения груза:


Из непосредственного опыта каждый знает, что каток действительно отстает от груза.
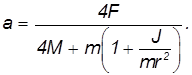
Подставляя соотношения для ускорений в уравнения движения и решая их относительно неизвестных  , , , получаем следующие выражение для ускорения груза
, , , получаем следующие выражение для ускорения груза
Обе силы трения и оказываются при этом положительными, так что на рис. 12 их направления выбраны правильно:
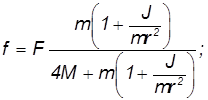
Как видно, радиус катка особой роли не играет: отношение  зависит только от его формы. При данных массе и радиусе момент инерции катка максимален, когда каток представляет собой трубу:
зависит только от его формы. При данных массе и радиусе момент инерции катка максимален, когда каток представляет собой трубу:  . В этом случае сила трения между катком и настилом отсутствует ( = 0) а уравнения для ускорения груза и силы трения между грузом и катком принимают вид:
. В этом случае сила трения между катком и настилом отсутствует ( = 0) а уравнения для ускорения груза и силы трения между грузом и катком принимают вид:
При уменьшении массы катка сила трения уменьшается, ускорение груза увеличивается — груз легче перемещать.
В случае катка-цилиндра (бревна) /2 и мы находим силы трения
и ускорение груза.
Сравнивая с результатами для катка-трубы, видим, что эффективно масса катка как бы уменьшилась: ускорение груза возрастает при прочих равных условиях.
Главный итог рассмотренного примера: ускорение отлично от нуля (то есть груз начинает двигаться) при сколь угодно малой внешней силе. При волочении же груза по настилу для его смещения необходимо приложить как минимум силу  .
.
Второй вывод: ускорение вовсе не зависит от величины трения между частями данной системы. Коэффициент трения  не вошел в найденные решения, он появится только в условиях отсутствия проскальзывания, которые сводятся к тому, что приложенная сила не должна быть слишком велика.
не вошел в найденные решения, он появится только в условиях отсутствия проскальзывания, которые сводятся к тому, что приложенная сила не должна быть слишком велика.
Полученный результат, что каток как бы полностью «уничтожает» силу трения, не удивителен. Действительно, в отсутствие относительного перемещения соприкасающихся поверхностей силы трения не совершают работы. На самом деле каток «заменяет» трение скольжения на трение качения, которым мы пренебрегли. В реальном случае минимальная сила, необходимая для движения системы, отлична от нуля, хотя и гораздо меньше, чем при волочении груза по настилу. В современной технике принцип действия катка реализуется в шарикоподшипниках.
Качественное рассмотрение работы колеса. Разобравшись с катком, перейдем к колесу. Первое колесо в виде деревянного диска, насаженного на ось, появилось, по-видимому, в IV тысячелетии до н.э. в цивилизациях Древнего Востока. Во II тыс. до н.э. конструкция колеса совершенствуется: появляются спицы, ступица и гнутый обод. Изобретение колеса дало гигантский толчок развитию ремесел и транспорта. Однако многие не понимают самого принципа действия колеса. В ряде учебников и энциклопедий можно найти неверное утверждение, что колесо, подобно катку, также дает выигрыш, заменяя силу трения скольжения на силу трения качения. Иногда приходится слышать ссылки на использование смазки или подшипников, но дело не в этом, поскольку колесо с очевидностью появилось раньше, чем додумались до смазки (и, тем более, подшипников).
Действие колеса проще всего понять, исходя из энергетических соображений. Древние повозки устроены просто: кузов прикрепляется к деревянной оси радиусом (общая масса кузова с осью равна M). На ось насаживаются колеса массой и радиусом R (рис. 7.29).
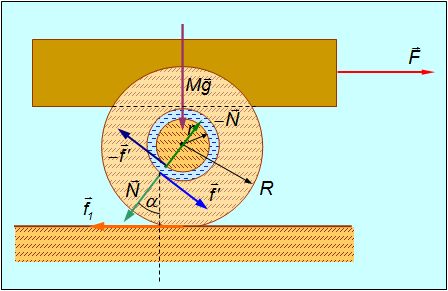
Рис. 7.29. Передвижение движение груза с помощью колеса
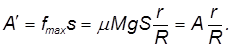
Предположим, что такую повозку везут по деревянному же настилу (тогда во всех соприкасающихся местах имеем тот же коэффициент трения ). Сначала заклиним колеса и, действуя силой , протащим повозку на расстояние s . Поскольку повозка скользит по настилу, сила трения достигает своего максимально возможного значения

Работа против этой силы равна

(так как обычно масса колес много меньше массы повозки <<M).
Освободим теперь колеса и снова протащим повозку на то же расстояние s. Если колеса не скользят по настилу, то в нижней точке колеса сила трения не совершает работы. Но трение скольжения возникает между осью и колесом в нижней части оси радиусом . Там тоже имеется сила нормального давления. Она будет несколько отличаться от прежней за счет веса колес и других причин, которые мы обсудим ниже, но при небольшой массе колес и небольшом коэффициенте трения можно считать ее примерно равной  . Поэтому между осью и колесом действует та же самая сила трения
. Поэтому между осью и колесом действует та же самая сила трения

Подчеркнем еще раз: колесо само по себе не уменьшает силу трения. Но работа A’ против этой силы будет теперь гораздо меньше, чем в случае волочения повозки с заклиненными колесами. Действительно, когда повозка проходит расстояние S, ее колеса совершают  оборотов. Значит, трущиеся об ось колеса поверхности сдвинутся друг относительно друга на меньшее расстояние
оборотов. Значит, трущиеся об ось колеса поверхности сдвинутся друг относительно друга на меньшее расстояние  . Поэтому работа против сил трения также будет в соответствующее число раз меньше:
. Поэтому работа против сил трения также будет в соответствующее число раз меньше:
Таким образом, надев колеса на оси, мы уменьшаем не силу трения, как в случае с катком, а путь, на котором она действует. Скажем, колесо радиусом R = 0,5 м и осью радиусом = 2 см уменьшает работу на 96 %. С остальными 4 % успешно справляются смазка и подшипники, уменьшающие само трение (смазка, кроме того, предотвращает износ ходовой части повозки). Теперь понятно, почему в старых экипажах и боевых колесницах делали такие большие колеса. Современные продуктовые коляски в супермаркетах могут катиться лишь благодаря подшипникам.
Из полученной формулы для работы при качении следует, что при = R (колеса без оси, вмонтированные в корпус и трущиеся об него) будет совершена та же работа, что и при волочении повозки. Весь выигрыш заключен в отношении радиусов /R, то есть колесо — по сути дела рычаг непрерывного действия с плечами и R. Благодаря «сворачиванию» рычага в окружность его не надо возвращать в начальное положение: это достигается автоматически. Трудно представить себе техническое изобретение, более гениальное по простоте и эффективности!
Количественная теория колеса. Рассмотрим силы, действующие на нашу повозку (см. рис. 7.29).
Силы, действующие на колесо: сила трения  со стороны оси, сила нормального давления
со стороны оси, сила нормального давления  со стороны оси, сила трения со стороны настила. Эти силы показаны на рис. 7.29 соответственно синей, зеленой и оранжевой стрелками. Заметим, что мы не предполагаем, что ось соприкасается с колесом в своей нижней точке: угол
со стороны оси, сила трения со стороны настила. Эти силы показаны на рис. 7.29 соответственно синей, зеленой и оранжевой стрелками. Заметим, что мы не предполагаем, что ось соприкасается с колесом в своей нижней точке: угол  описывает смещение назад точки соприкосновения оси с колесом (соответственно, точки приложения сил , ). Значение угла также должно быть найдено из решений уравнений движения. Кроме того, на колесо действует сила тяжести
описывает смещение назад точки соприкосновения оси с колесом (соответственно, точки приложения сил , ). Значение угла также должно быть найдено из решений уравнений движения. Кроме того, на колесо действует сила тяжести  и нормальное давление
и нормальное давление  со стороны настила, но они сейчас нам не важны и на рисунке не показаны.
со стороны настила, но они сейчас нам не важны и на рисунке не показаны.
Выбирая ось х в горизонтальном направлении, а ось у — в вертикальном, записываем проекцию уравнения поступательного движения колеса на ось x :
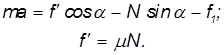
Предполагая отсутствие проскальзывания в точке соприкосновения колеса с настилом (то есть  ), записываем уравнение вращательного движения колеса:
), записываем уравнение вращательного движения колеса:
Силы, действующие на повозку (показаны соответственно красной, фиолетовой, темно-синей и темно-зеленой стрелками на рис. 7.29): внешняя сила  , сила тяжести и силы
, сила тяжести и силы  ,
,  со стороны оси. Записываем уравнения поступательного движения повозки в проекциях на оси x, y :
со стороны оси. Записываем уравнения поступательного движения повозки в проекциях на оси x, y :
Мы имеем пять уравнений для пяти неизвестных:  , , , , . Их все можно найти, решая систему уравнений. Мы хотим получить лишь ответ на вопрос: при какой минимальной силе
, , , , . Их все можно найти, решая систему уравнений. Мы хотим получить лишь ответ на вопрос: при какой минимальной силе  повозка сдвинется с места? Для этого надо положить
повозка сдвинется с места? Для этого надо положить  , при этом ускорение = 0. Имеем тогда систему уравнений:
, при этом ускорение = 0. Имеем тогда систему уравнений:
Здесь мы уже учли выражение закона трения скольжения. Из двух первых уравнений следует:

откуда можно найти тригонометрические функции угла :
Тогда из двух последних уравнений следует искомое выражение:
Любопытно, что масса колес не вошла в конечный ответ для  .
.
В предельном случае = R имеем  , что соответствует, в сущности, отсутствию колес и перетаскивание повозки волоком. В обратном предельном случае
, что соответствует, в сущности, отсутствию колес и перетаскивание повозки волоком. В обратном предельном случае

минимальная сила также стремится к нулю. При малых коэффициентах трения квадратный корень в знаменателе приближенно равен единице, и
Выше мы качественно получили этот результат из энергетических соображений.