V. Метод координат в пространстве
§22. Аффинная и прямоугольная декартова системы координат в пространстве
Определение 1. 1) Аффинной системой координат или аффинным репером в пространстве называется совокупность некоторой точки и некоторого базиса . Точка называется началом координат, векторы – координатными векторами; 2) аффинная система координат называется правой, если связанный с ней базис – правый, и левой, если базис – левый; 3) оси, проходящие через начало координат и сонаправленные с векторами , соответственно осью абсцисс, ординат, аппликат или координатными осями. Три плоскости, каждая из которых проходит через две координатные оси, называются координатными плоскостями. Восемь частей, на которые координатные плоскости делят пространство, называются октантами.
Обозначения. Ось абсцисс — или ; ось ординат — или ;
ось аппликат — или .
Координатные плоскости: или ; или ; или .

Определение 2. Пусть = — аффинная система координат, а – произвольная точка пространства. Вектор называется радиус – вектором точки (относительно точки ). Координаты вектора в базисе называются аффинными координатами точки в данной системе координат. При этом число называется абсциссой, число — ординатой, число — аппликатой точки .
По аналогии с планиметрией справедливо утверждение: если в пространстве задана аффинная система координат, то этим установлена биекция между точками пространства и упорядоченными тройками действительных чисел .
Пусть аппликата точки равна нулю: = 0. Тогда из равенства (1) получаем: .
По определению линейной зависимости векторов вектора , , — линейно зависимы, а значит, компланарны. Тогда точка лежит в плоскости . Из предыдущего равенства следует, что в этой плоскости в системе координат точка имеет координаты .
Аналогично, если = 0, то , а если = 0, то .
Отсюда следует также, что для любой точки оси абсцисс = = 0, для любой точки оси ординат = = 0, для любой точки оси аппликат = = 0.
Начало координат имеет три нулевые координаты — .
Способ построения точки по её координатам:
1) От начала координат откладываем вектор ;
2) От точки откладываем вектор ;
3) От точки откладываем вектор .
По правилу многоугольника имеем:
то есть – искомая точка

Ломаная называется координатной ломаной точки . Итак, для построения точки достаточно построить её координатную ломаную.
Определение 3. Пространство называется ориентированным, если в нем выбрана какого-либо вида аффинная система координат (правая или левая).
1) В дальнейшем пространство будем считать положительно ориентированным, если в нем выбрана правая аффинная система координат;
2) Как и в планиметрии, доказывается формула: , где – начало вектора , – конец этого вектора.
Таким образом, каждая координата вектора в пространстве равна разности соответствующих координатам конца и начала вектора;
3) Координаты точки , делящей направленный отрезок , где , , в отношении ( = ) находятся по формулам: , , .
В частности, если — середина отрезка , то и , ;
4) Как и для плоскости, доказываются формулы перехода от системы координат к системе координат :
где , , , — в «старой» системе координат , , .
Матрица при этом имеет ранг 3 и является невырожденной; Она называется матрицей перехода от базиса к базису .
Так как, векторы нового базиса некомпланарны, а, значит, и линейно независимы, то определитель . Поэтому система (3) разрешима относительно переменных . Это позволяет выразить координаты точки в «новой» системе через координаты той же точки в «старой» системе.
5) Формулы параллельного переноса системы координат в точку принимают вид:
Определение 4. Аффинная система координат называется прямоугольной декартовой или просто декартовой, если её координатные векторы образуют ортонормированный базис.
Обозначение. , , .

Теорема. Расстояние от точки до точки в прямоугольной декартовой системе координат выражается формулой:
Так как , то получаем = .
Замечание. В дальнейшем мы будем пользоваться только прямоугольными декартовыми системами координат
Если рассматривается преобразование прямоугольных систем координат и , то можно пользоваться формулами (5). Однако, на элементы матрицы перехода от базиса к базису ( накладываются определённые ограничения:
а) Сумма квадратов элементов каждой её строки или столбца равна единице;
б) Сумма произведений соответствующих элементов любых её двух различных строк или столбцов равна нулю.
Это происходит, потому что элементы столбцов матрицы являются соответственно координатами единичных и взаимно ортогональных векторов в базисе
Матрица в этом случае называется ортогональной. В частности, матрица параллельного переноса является единичной и ортогональной.
Примеры. Следующие матрицы являются ортогональными:
Квадратная матрица порядка , для которой (невырожденной), называется ортогональной, если
Ранг невырожденной матрицы порядка равен
Можно доказать, что если системы «старая» и «новая» ориентированы одинаково, то
Пусть ∆ — определитель ортогональной матрицы , тогда по правилу умножения матриц и используя определение ортогональных матриц, получаем:
Применяя к этому равенству теорему об определении произведения матриц, получаем ∆ 2 = 1, то есть ∆ = ±1.
Как уже отмечалось ранее, скалярным произведением векторов и в системе называется число:
Аппликата
АППЛИКАТИВ МОДЕЛЬ ЛИНГВИСТИК ТАҲЛИЛ УСУЛИ СИФАТИДА
Ушбу мақолада тилшуносликда моделлаштириш, хусусан аплликатив модел ва унинг ўзига хос хусусиятлари ҳақида фикр юритилган. Ишда аплликатив моделнинг трансформация ва деривация жараѐнлари билан боғлиқлиги ҳамда фарқли жиҳатлари таҳлил қилинган. Мақолада келтириб ўтилган ясама сўзларнинг аппликатив модел билан ҳосил бўлиш жараѐнлари лексик деривацияда операнд, оператор ҳамда аппликатор атамалари мисолида амалий жиҳатдан мисоллар орқали таҳлил этилган
Уравнение касательной к плоскости и нормали
Найдём аппликату этой точки: $z_0=\frac<5\cdot(-1)><1-2>=5.$ Для составления искомых уравнений нам потребуются
Опыт применения торфяного препарата «Томед -аппликат» в санатории «Лунёво»
Еще термины по предмету «Высшая математика»
Пирамидальная поверхность
коническая поверхность, направляющая которой — многоугольник
Полный дифференциал
дифференциал функции нескольких переменных
Самосопряженная матрица
- Вронскиан
- Гиперболоид
- Замыкание (множества)
- Индуктивное определение
- Испытания Бернулли
- Квадратичная функция
- Лейбница ряд
- Мантисса
- Многоугольник
- Нормальная кривизна
- Нульмерное множество
- Обратное отношение (инверсия отношения)
- Отрицательный угол
- Пирамидальная поверхность
- Полный угол
- Простая цепь
- Процентили (перцентили)
- Псевдовектор
- Самосопряженная матрица
- Трином
Повышай знания с онлайн-тренажером от Автор24!
- Напиши термин
- Выбери определение из предложенных или загрузи свое
- Тренажер от Автор24 поможет тебе выучить термины с помощью удобных и приятных карточек
Все сервисы Справочника в твоем телефоне! Просто напиши Боту, что ты ищешь и он быстро найдет нужную статью, лекцию или пособие для тебя!
Подписаться через qr-код
- Научные статьи
- Лекторий
- Методические указания
- Справочник терминов
- Статьи от экспертов
- Отзывы об Автор24
- Последние статьи
- Акции партнеров
- Помощь эксперта
- Справочник рефератов
- Для правообладателей
- Работа для преподавателей
- Работа для репетиторов
- Психологическая помощь
- Партнерская программа
Возможность создать свои термины в разработке
Еще чуть-чуть и ты сможешь писать определения на платформе Автор24. Укажи почту и мы пришлем уведомление с обновлением ☺️
Включи камеру на своем телефоне и наведи на qr-код. Edu24_bot откроется на устройстве
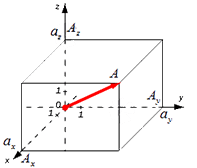
Аппликата
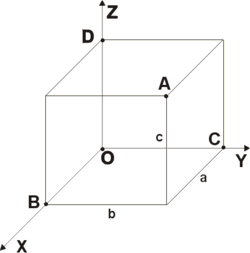
Аппликатой точки A называется координата этой точки на оси OZ в прямоугольной трёхмерной системе координат. Величина аппликаты точки A равна длине отрезка OD (см. рис. 1). Если точка D принадлежит положительной полуоси OZ, то аппликата имеет положительное значение. Если точка D принадлежит отрицательной полуоси OZ, то аппликата имеет отрицательное значение. Если точка A лежит на плоскости XOY, то её аппликата равна нулю.
Слово «аппликата» происходит от лат. applicata , что означает «приложенная». Имеется в виду, что координата Z (аппликата) была приложена к уже имевшимся двум координатам на плоскости: абсциссе и ординате.
В прямоугольной системе координат ось OZ называется «осью аппликат».
См. также
- Системы координат
Wikimedia Foundation . 2010 .
Смотреть что такое «Аппликата» в других словарях:
АППЛИКАТА — (от лат. applicata букв. приложенная), одна из декартовых координат точки в пространстве … Большой Энциклопедический словарь
аппликата — сущ., кол во синонимов: 1 • апликата (1) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
аппликата — (лат. applicata прилегающая) мат. координата нек рой точки по оси z в системе декартовых координат в пространстве. Новый словарь иностранных слов. by EdwART, , 2009. аппликата [от лат. applicata тесно прилегающая] – название одного из трёх чисел … Словарь иностранных слов русского языка
аппликата — ы; ж. Матем. Величина, определяющая положение некоторой точки в пространстве по оси Z в прямоугольной системе координат (ср. абсцисса, ордината). * * * аппликата (от лат. applicata, буквально приложенная), одна из декартовых координат точки в… … Энциклопедический словарь
аппликата — aplikata statusas T sritis fizika atitikmenys: angl. applicate vok. Applikate, f; Kote, f; z Koordinate, f rus. аппликата, f pranc. côte, f … Fizikos terminų žodynas
аппликата — аппликата, аппликаты, аппликаты, аппликат, аппликате, аппликатам, аппликату, аппликаты, аппликатой, аппликатою, аппликатами, аппликате, аппликатах (Источник: «Полная акцентуированная парадигма по А. А. Зализняку») … Формы слов
АППЛИКАТА — одна из декартовых координат точки в трехмерном пространстве … Математическая энциклопедия
АППЛИКАТА — (от лат. applicata, букв. приложенная) одна из декартовых координат точки в пространстве, обычно третья, обозначаемая буквой г … Большой энциклопедический политехнический словарь
АППЛИКАТА — (от лат. applicata, букв. приложенная), одна из декартовых координат точки в пространстве … Естествознание. Энциклопедический словарь
аппликата — апплик ата, ы … Русский орфографический словарь
Как найти аппликату точки если известны углы и длина вектора
Длина вектора, угол между векторами – эти понятия являются естественно-применимыми и интуитивно понятными при определении вектора как отрезка определенного направления. Ниже научимся определять угол между векторами в трехмерном пространстве, его косинус и рассмотрим теорию на примерах.
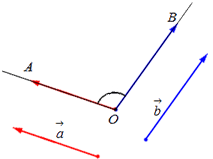
Для рассмотрения понятия угла между векторами обратимся к графической иллюстрации: зададим на плоскости или в трехмерном пространстве два вектора a → и b → , являющиеся ненулевыми. Зададим также произвольную точку O и отложим от нее векторы O A → = b → и O B → = b →
Углом между векторами a → и b → называется угол между лучами О А и О В .
Полученный угол будем обозначать следующим образом: a → , b → ^
Очевидно, что угол имеет возможность принимать значения от 0 до π или от 0 до 180 градусов.
a → , b → ^ = 0 , когда векторы являются сонаправленными и a → , b → ^ = π , когда векторы противоположнонаправлены.
Векторы называются перпендикулярными, если угол между ними равен 90 градусов или π 2 радиан.
Если хотя бы один из векторов является нулевым, то угол a → , b → ^ не определен.
Нахождение угла между векторами
Косинус угла между двумя векторами, а значит и собственно угол, обычно может быть определен или при помощи скалярного произведения векторов, или посредством теоремы косинусов для треугольника, построенного на основе двух данных векторов.
Согласно определению скалярное произведение есть a → , b → = a → · b → · cos a → , b → ^ .
Если заданные векторы a → и b → ненулевые, то можем разделить правую и левую части равенства на произведение длин этих векторов, получая, таким образом, формулу для нахождения косинуса угла между ненулевыми векторами:
cos a → , b → ^ = a → , b → a → · b →
Данная формула используется, когда в числе исходных данных есть длины векторов и их скалярное произведение.
Исходные данные: векторы a → и b → . Длины их равны 3 и 6 соответственно, а их скалярное произведение равно — 9 . Необходимо вычислить косинус угла между векторами и найти сам угол.
Решение
Исходных данных достаточно, чтобы применить полученную выше формулу, тогда cos a → , b → ^ = — 9 3 · 6 = — 1 2 ,
Теперь определим угол между векторами: a → , b → ^ = a r c cos ( — 1 2 ) = 3 π 4
Ответ: cos a → , b → ^ = — 1 2 , a → , b → ^ = 3 π 4
Чаще встречаются задачи, где векторы задаются координатами в прямоугольной системе координат. Для таких случаев необходимо вывести ту же формулу, но в координатной форме.
Длина вектора определяется как корень квадратный из суммы квадратов его координат, а скалярное произведение векторов равно сумме произведений соответствующих координат. Тогда формула для нахождения косинуса угла между векторами на плоскости a → = ( a x , a y ) , b → = ( b x , b y ) выглядит так:
cos a → , b → ^ = a x · b x + a y · b y a x 2 + a y 2 · b x 2 + b y 2
А формула для нахождения косинуса угла между векторами в трехмерном пространстве a → = ( a x , a y , a z ) , b → = ( b x , b y , b z ) будет иметь вид: cos a → , b → ^ = a x · b x + a y · b y + a z · b z a x 2 + a y 2 + a z 2 · b x 2 + b y 2 + b z 2
Исходные данные: векторы a → = ( 2 , 0 , — 1 ) , b → = ( 1 , 2 , 3 ) в прямоугольной системе координат. Необходимо определить угол между ними.
Решение
- Для решения задачи можем сразу применить формулу:
cos a → , b → ^ = 2 · 1 + 0 · 2 + ( — 1 ) · 3 2 2 + 0 2 + ( — 1 ) 2 · 1 2 + 2 2 + 3 2 = — 1 70 ⇒ a → , b → ^ = a r c cos ( — 1 70 ) = — a r c cos 1 70
- Также можно определить угол по формуле:
cos a → , b → ^ = ( a → , b → ) a → · b → ,
но предварительно рассчитать длины векторов и скалярное произведение по координатам: a → = 2 2 + 0 2 + ( — 1 ) 2 = 5 b → = 1 2 + 2 2 + 3 2 = 14 a → , b → ^ = 2 · 1 + 0 · 2 + ( — 1 ) · 3 = — 1 cos a → , b → ^ = a → , b → ^ a → · b → = — 1 5 · 14 = — 1 70 ⇒ a → , b → ^ = — a r c cos 1 70
Ответ: a → , b → ^ = — a r c cos 1 70
Также распространены задачи, когда заданы координаты трех точек в прямоугольной системе координат и необходимо определить какой-нибудь угол. И тогда, для того, чтобы определить угол между векторами с заданными координатами точек, необходимо вычислить координаты векторов в виде разности соответствующих точек начала и конца вектора.
Исходные данные: на плоскости в прямоугольной системе координат заданы точки A ( 2 , — 1 ) , B ( 3 , 2 ) , C ( 7 , — 2 ) . Необходимо определить косинус угла между векторами A C → и B C → .
Решение
Найдем координаты векторов по координатам заданных точек A C → = ( 7 — 2 , — 2 — ( — 1 ) ) = ( 5 , — 1 ) B C → = ( 7 — 3 , — 2 — 2 ) = ( 4 , — 4 )
Теперь используем формулу для определения косинуса угла между векторами на плоскости в координатах: cos A C → , B C → ^ = ( A C → , B C → ) A C → · B C → = 5 · 4 + ( — 1 ) · ( — 4 ) 5 2 + ( — 1 ) 2 · 4 2 + ( — 4 ) 2 = 24 26 · 32 = 3 13
Ответ: cos A C → , B C → ^ = 3 13
Угол между векторами можно определить по теореме косинусов. Отложим от точки O векторы O A → = a → и O B → = b → , тогда, согласно теореме косинусов в треугольнике О А В , будет верным равенство:
A B 2 = O A 2 + O B 2 — 2 · O A · O B · cos ( ∠ A O B ) ,
b → — a → 2 = a → + b → — 2 · a → · b → · cos ( a → , b → ) ^
и отсюда выведем формулу косинуса угла:
cos ( a → , b → ) ^ = 1 2 · a → 2 + b → 2 — b → — a → 2 a → · b →
Для применения полученной формулы нам нужны длины векторов, которые несложно определяются по их координатам.
Хотя указанный способ имеет место быть, все же чаще применяют формулу:
3.1.7. Примеры решения задач по теме «Линейные операции над векторами. Скалярное произведение»
Даны векторы А = (-2; 3; 5) и B = (4; -1; 7). Найти координаты вектора
При умножении вектора на число все его координаты
Умножаются на это число, при сложении векторов складываются их соответствующие координаты.
Координаты коллинеарных векторов пропорциональны.
Если A || B, то  . Отсюда:
. Отсюда:

Ответ:  .
.
Найти направляющие косинусы вектора А = .
Направляющие косинусы являются координатами орта (единичного вектора) данного направления.
Найдем модуль вектора А:

Разделив все координаты вектора А на его модуль, получим координаты орта:


Ответ: 
Тогда AA + BB + GC = , причем координаты этого вектора должны равняться соответствующим координатам вектора D. Приравнивая эти координаты, получаем систему уравнений для определения A, B, G:

Для векторов A = , B = , C = , D = найти такие числа A, B, G, чтобы векторы AA, BB, GC и D образовали замкнутую ломаную линию, если начало каждого последующего вектора совместить с концом предыдущего.

C = линейно зависимой или линейно независимой.
Система векторов называется линейно независимой, если равенство
Вычислим главный определитель Δ системы уравнений


По правилу Крамера система имеет единственное решение, но для однородной системы всегда существует нулевое решение (A = B = G = 0).
Поскольку других решений нет, данная система векторов линейно независима.
Ответ: Система векторов линейно независима.
Найти координаты какого-либо вектора, направленного по биссектрисе угла между векторами А = (-4; 3; 0) и B = (12; -15; 16).
Диагональ параллелограмма является биссектрисой угла между сторонами только в том случае, если этот параллелограмм – ромб. Следовательно, искомым вектором можно считать сумму двух векторов равной длины, коллинеарных соответственно векторам А и B.
Вектор A + B направлен по диагонали параллелограмма, построенного на векторах А и B как на смежных сторонах и выходящей из общего начала векторов А и B.
Диагональ параллелограмма является биссектрисой угла между сторонами только в том случае, если этот параллелограмм – ромб. Следовательно, искомым вектором можно считать сумму двух векторов равной длины, коллинеарных соответственно векторам А и B.

Следовательно, |5A| = |B|. Значит, параллелограмм со сторонами, совпадающими с векторами 5A и B, является ромбом, поэтому вектор 5A + B будет иметь заданное направление.
При каких значениях X, Y, Z точки А(Х; -1; 3), В(5; -4; Z), C(-2; Y; 9), D(-5; 1; 7) являются вершинами параллелограмма?
Для выполнения условия задачи требуется коллинеарность векторов  и
и  и
и  и
и  .
.
Для выполнения условия задачи требуется коллинеарность векторов и и и .
Найдем координаты этих векторов:


Из последней пропорции получаем, что Z = 1 – 2Y. Тогда


Но при этих значениях неизвестных


Условие задачи выполнено.
Используйте определение скалярного произведения:
Используем свойства скалярного произведения:
По определению скалярного произведения

Сложим левые и правые части полученных равенств:
Даны векторы А = и B = . Найти скалярное произведение
Найдите координаты векторов 3А – B и A + 2B или используйте свойства скалярного произведения.
Используем свойства скалярного произведения:
Используйте формулу, выражающую косинус угла между векторами через их скалярное произведение.

Ответ:  .
.
Координаты вектора B пропорциональны координатам А. Если K – коэффициент пропорциональности, то B = .
Координаты вектора B пропорциональны координатам А. Если K – коэффициент пропорциональности, то B = .
Известно, что |A| = 2, |B| = 7. Найти значения K, при которых векторы
Если векторы перпендикулярны, то их скалярное произведение равно нулю.
Если векторы перпендикулярны, то их скалярное произведение равно нулю.

Ответ: K =  .
.
Найти проекцию вектора А = на ось, образующую с координатными осями Ох и Оу углы 60о и 45о, а с осью Oz – тупой угол γ.
Используйте свойство направляющих косинусов:
Найдем cosγ: cos260o + cos245o + cos2γ = 1,

Тогда проекция А на заданную ось равна:
Длина вектора — основные формулы
Время чтения: 16 минут
Основные понятия вектора
Для того чтобы приступить к разбору формул нахождения длины вектора, необходимо разобраться в основных понятиях и определениях векторов.
Понятие вектора получило широкое распространение в 19 веке, в математических науках, особенно в таком её разделе, как «Комплексные числа».
Вектор — это отрезок с определённой длиной и направлением.
Графическое изображение вектора — отрезок который имеет указание направления в виде стрелки.
Вектор, который будет иметь начальную точку Х и конец в точке А, правильно обозначать ХА, с верхним подчёркиванием или стрелочкой, а также допустимо прописывать одной прописной буквой.
Длину вектора (модуль), определяет числовое значение длины отрезка, имеющего направление. Обозначается длинна двумя вертикальными отрезками |ХА|.
- Понятие нулевого вектора. Такое название получил вектор, у которого и начало, и конец находятся в одной точке. Обозначение он имеет в виде цифры ноль с верхним подчёркивание, а длина равна нулю.
- Коллинеарные вектора. Одна прямая может содержать несколько векторов, такие векторы получили название коллинеарных. Также коллинеарными считаются векторы на параллельных прямых.
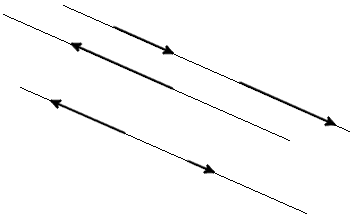
- Сонаправленные. Два коллинеарных вектора считаются сонаправленными, если имеют одно направление.
- Противоположно направленные. Вектора, с направлениями в разные стороны, и являются коллинеарными, называют противоположно направленными.
- Компланарные вектора. Такими векторами называют, те что лежат в одной плоскости
Так как, всегда можно отыскать плоскость, которая будет параллельной двум векторам, то любые два вектора всегда копланарные.
Так как, всегда можно отыскать плоскость, которая будет параллельной двум векторам, то любые два вектора всегда копланарные.
Вектора могут находится не только на плоскости, но и в пространстве, от этого расположения будет зависеть какую формулу необходимо использовать для нахождения их длины или модуля. Стоит также отметить, что вектора могут быть равными, при этом они должны иметь одно направление, одинаковые длины и быть коллинеарными. Существует понятие единичного вектора, таким он будет являться если равен единице измерения.
Как найти длину вектора
Модуль вектора а будем обозначать  .
.
Для того чтобы найти модуль вектора или его длину, на плоскости по координатам, необходимо рассмотреть вектор используя прямоугольную декартову систему координат Оxy. Допустим в данной системе будет задан, так вектор />имеющий координаты (aₓ ; aᵧ). Получим формулу, которая поможет найти длину вектора />, через известные нам координаты aₓ и aᵧ.
На взятой системе координат, от её начала отложим вектор  В соответствии с проекцией точки А возьмём и определим Aₓ и Aᵧ на оси координат. Рассмотрим полученный прямоугольник ОAₓ и АAᵧ с диагональю ОА.
В соответствии с проекцией точки А возьмём и определим Aₓ и Aᵧ на оси координат. Рассмотрим полученный прямоугольник ОAₓ и АAᵧ с диагональю ОА.
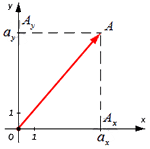
Далее используя теорему Пифагора мы получим равенство АО² = ОAₓ² и OAᵧ², отсюда следует
Теперь в соответствии с определением вектора относительно прямоугольной оси координат выходит, что ОAₓ² = aₓ² и также для OAᵧ² = aᵧ² , а так как на построенном прямоугольнике мы видим, что ОА равна длине вектора  получаем
получаем

Из вышесказанного выходит, что для того чтобы найти длину вектора с точками (aₓ ; aᵧ), выводим следующую формулу:
Когда вектор  дан в формате разложения по координатным векторам
дан в формате разложения по координатным векторам  , то вычислить его можно по той же формуле , в таком варианте коэффициент aₓ и aᵧ будут выражать в роли координат , в данной системе координат.
, то вычислить его можно по той же формуле , в таком варианте коэффициент aₓ и aᵧ будут выражать в роли координат , в данной системе координат.
Чтобы рассчитать длину = (3, √x), расположенного в прямоугольной системе координат.
Чтобы найти модуль вектора используем ранее приведённую формулу

Ответ: 
Существуют также формулы вычисления длины вектора в пространстве, они выводятся аналогично тем, что в системе координат на плоскости. Если взять вектор =(aₓ ; aᵧ ; a  )
)
В таком случае \( AO^2=OA_x^2+OA_y^2+OA_z^2 \) (из рисунка видно, что АО — диагональ прямоугольного параллелепипеда), поэтому

из определения получаются равенства ОAₓ=aₓ; OAᵧ=aᵧ; OA />=a />, а значение длины ОА совпадает с длиной вектора, которую необходимо найти. Из этого следует:

Ответ: 
Длина вектора через координаты точек начала и конца
Ранее мы рассмотрели формулы, которые позволят находить длину вектора используя при этом координаты. Рассматривались примеры в трёхмерном пространстве на плоскости. Используя данные формулы можно найти длину вектора, если известны координаты точек его начала и конца.
Возьмём точки с обозначенными координатами начала A(aₓ ; aᵧ) и конца В(bₓ ; bᵧ), из чего следует, что вектор  имеет координаты (bₓ-aₓ ; bᵧ-aᵧ), поэтому его длину мы выразим в формуле
имеет координаты (bₓ-aₓ ; bᵧ-aᵧ), поэтому его длину мы выразим в формуле

При этом формула вычисления длины вектора для трёхмерного пространства, с координатами  и
и  ), будет следующей:
), будет следующей:

Для прямой системы координат, найти длину вектора \( \overrightarrow\) , где A(1,√3) B(-3,1)
Решение
Применив формулу, для нахождения длины вектора, с известными координатами точек начала и конца, в плоской системе координат, выходит:

Существует второй вариант решения, где формулы применяются по очереди:


Ответ: 
Найти, решения, при подстановке которых, длина вектора будет равна корню из тридцати, при координатах точек А (0,1,2) и В (5,2,\(λ^2\))
Длина вектора по теореме косинусов
Так как бывают случаи, когда не известны координаты точек вектора, необходимо искать другие варианты, при помощи которых можно найти длину вектора. Таким способов может стать применение теоремы косинусов.
В нашем примере длины векторов и длины сторон треугольника АМК совпадают. Две из сторон нам известны это АК и АМ, а также известен угол треугольника, находящийся между этими сторонами. Используя теорему косинусов получим:
\( KM^2=AK^2+AM^2-2\cdot AK\cdot AM\cdot\cos\frac \)
\(=2^2+4^2-2\cdot2\cdot4\cdot\cos\frac \)
\(=4+16-16\cos\frac \)
\(=20-8=12 \)
Получается \(KM=\sqrt \)
Ответ: \( \left|\overrightarrow \right|=\sqrt \)
Теперь мы видим, что для нахождения длины вектора существует несколько формул, которыми можно воспользоваться в зависимости от известных параметров.
длина вектора формула для трёхмерного пространства;
длина вектора формула по известным координатам начала и конца вектора находящегося пространстве; \( \left|\vec\right|=\sqrt \) если известны координаты начала и конца вектора на плоскости.
Существует также формула длины вектора перемещения: \( \left|\vec \right|=\sqrt \) чаще такая формула применима в физике, для того чтобы узнать длину пути материальной точки.
В случае если известен угол, между двумя векторами, можно использовать теорему Пифагора.
Применение векторов в других сферах
Понятие и вычисление вектора важно не только в математике, но и других науках:
- в физике. Для визуального изображения таких понятий как скорость, сила, ускорение и т.д. А также векторы помогают моделировать физические процессы;
- в химии. Для изображения химических процессор. При помощи векторов изображают движение электронов и других частиц;
- в биологии. Биологические процессы, также имеют графическое изображение при помощи векторов. К примеру перенос паразитов;
- географии. Вектором обозначается движение воздушных масс, или течение реки;
Векторы используются не только в науках, но и различных отраслях и профессиях. В судоходстве и аэрофлоте, архитектуре и конструировании, а также многих других областях. Для того чтобы найти длину вектора, мы можем использовать одну из формул, в зависимости от того, что нам о нём известно, и в каком пространстве или плоскости находится неизвестный вектор.