10. Определение правой тройки векторов. Векторное произведение векторов, его свойства, геометрический смысл.
Тройка векторов  ,
, и
и называется правой, если
называется правой, если направлен так, что из его конца кратчайший поворот от
направлен так, что из его конца кратчайший поворот от к
к происходит против часовой стрелки.
происходит против часовой стрелки.
Векторным произведением вектора  на вектор
на вектор называется третий вектор
называется третий вектор который обладает следующими свойствами:
который обладает следующими свойствами:
Его длина равна

Вектор  перпендикулярен к плоскости, в которой лежат вектора
перпендикулярен к плоскости, в которой лежат вектора и
и
Вектор  направлен так, что поворот от вектора
направлен так, что поворот от вектора к вектору
к вектору осуществляется против часовой стрелки, если смотреть из конца вектора
осуществляется против часовой стрелки, если смотреть из конца вектора (тройка векторов
(тройка векторов ,
, и
и – правая).
– правая).
Основные свойства векторного произведения:
1) Векторное произведение  равно нулю, если векторы
равно нулю, если векторы и
и коллинеарны или какой-либо из перемножаемых векторов является нулевым.
коллинеарны или какой-либо из перемножаемых векторов является нулевым.
2) При перестановке местами векторов сомножителей векторное произведение меняет знак на противоположный 


Геометрический смысл векторного произведения: модуль векторного произведения векторов численно равен площади параллелограмма, построенного на этих векторах как на сторонах.
11. Смешанное произведение 3-х векторов, его свойства. Геометрический смысл. Вычисление в координатах. Необходимое и достаточное условие компланарности 3-х векторов.
Смешанным произведением векторов  ,
, ,
, называется число, равное (
называется число, равное ( *
* )*
)* = (
= ( ,
, ,
, )
)
Модуль смешанного произведения векторов  ,
, ,
, равен объёму параллелепипеда, построенного на векторах
равен объёму параллелепипеда, построенного на векторах ,
, ,
, .
.
1) ( *
* )*
)* =
= *(
*( *
* )
)
2) ( ,
, ,
, ) = (
) = ( ,
, ,
, ) = (
) = ( ,
, ) = — (
) = — ( ,
, ,
, ) = . циклически меняем
) = . циклически меняем
3)  ,
, ,
, – компланарны (
– компланарны ( ,
, ,
, ) = 0
) = 0
4)  ,
, ,
, – правая (
– правая ( ,
, ,
, ) > 0
) > 0
 ,
,  ,
, – левая (
– левая ( ,
, ,
, ) < 0
) < 0
5) ( 1+
1+ 2,
2, ,
, ) = (
) = ( 1,
1, ,
, ) + (
) + ( 2,
2, ,
, ) (α*
) (α* ,
, ,
, ) = α(
) = α( ,
, ,
, )
)
Вычисление в координатах: 
Необходимое и достаточное условие компланарности 3-х векторов :
Аналитическая геометрия
12. Виды уравнений прямой на плоскости. Расстояние от точки до прямой.

1) Общее уравнение прямой: Ax + By + C = 0
2) Уравнение прямой в отрезках: 
3) Уравнение прямой с угловым коэффициентом: y = kx + b
4) Каноническое уравнение прямой на плоскости: 
5) Параметрические уравнения прямой на плоскости: 
6) Нормальное уравнение прямой: 





 p— длина перпендикуляра, опущенного из начала координат на прямую, β- угол наклона этого перпендикуляра к осиO.
p— длина перпендикуляра, опущенного из начала координат на прямую, β- угол наклона этого перпендикуляра к осиO.
Расстояние точки A(x1, y1) до прямой Ax + By + C = 0 есть длина перпендикуляра, опущенного из этой точки на прямую. Она определяется по формуле:




13. Взаимное расположение двух прямых на плоскости, угол между прямыми.
Если прямые  и
и заданы общими уравнениями
заданы общими уравнениями и
и ,
,
тогда угол между ними находится по формуле: 
 –условие параллельности прямых
–условие параллельности прямых  и
и ;
;
 –условие перпендикулярности прямых
–условие перпендикулярности прямых  и
и .
.
 — прямые совпадают.
— прямые совпадают.
14. Виды уравнений плоскости. Расстояние от точки до плоскости.
Виды уравнений плоскости:
1) Общее: Ax + By + Cz + D = 0
2) В отрезках: 
3) Нормальное: 
Пусть плоскость  задана уравнениемAx + By + Cz + D = 0 и дана точка
задана уравнениемAx + By + Cz + D = 0 и дана точка  . Тогда расстояниеp от точки Mo до плоскости
. Тогда расстояниеp от точки Mo до плоскости  определяется по формуле
определяется по формуле
15. Взаимное расположение двух плоскостей, угол между плоскостями.
Взаимное расположение двух плоскостей характеризуется двумя возможностями^
1) Две плоскости не имеют общих точек, и , в таком случае, они называются параллельными
2) Две плоскости имеют хотя бы одну общую точку, и в таком случае они называются пересекающимися.
Пусть наши плоскости  и
и заданы уравнениями:
заданы уравнениями:
 :
: 
 :
:
Косинус угла  между плоскостями находится по такой формуле:
между плоскостями находится по такой формуле:
1) Плоскости параллельны: 
Определение правой и левой тройки векторов
Из курса физики известно, что скалярные величины или скаляры — это величины, вполне определяемые одним численным значением (например, масса, температура, объём, расстояние и пр.). То есть любое вещественное число является скаляром.
Векторные величины или векторы — это величины, которые определяют и численным значением, и направлением. Например, скорость.
Линейно зависимыми называются такие векторы $a,b,c. $, что если подобрать такие числа $x,y,z. $, из которых по крайней мере одно не равно $0$, то будет иметь место тождество $xa+yb+zc+. =0$. Если три вектора $a,b,c$ не равны $0$ и линейно зависимы, то они компланарны.
Связка трёх векторов — это приведённая к общему началу тройка некомпланарных векторов $a,b,c$.
Определение правой и левой тройки векторов
Приведём чертёж правой связки.
Рисунок 1. Чертёж правой связки. Автор24 — интернет-биржа студенческих работ
Рассмотрим кратчайшее вращение $\vec
Если большой палец и указательный пальцы левой руки вытянуть, а средний согнуть под углом ладони, то три пальца в порядке большой-указательный-средний составят правую связку. Те же пальцы на левой руке составят левую связку.
На чертеже левой связки то же вращение идёт по часовой стрелке.
Рисунок 2. Чертеж левой связки. Автор24 — интернет-биржа студенческих работ
Способы преобразования правой связки в левую и обратно:
- перестановка местами двух любых векторов;
- изменение знака при одном из векторов;
- замена какого-нибудь вектора его зеркальным отображением относительно плоскости двух других векторов.
Правая и левая системы координат
Напомним, что координатная ось — это ось, на которой выбрано начало и единица масштаба.
Ортогональная или прямоугольная система координат в пространстве — это система из трёх взаимно перпендикулярных координатных осей $Ox, Oy$ и $Oz$ с общим началом $O$. Ортами в ортогональной системе координат называют единичные векторы (то есть векторы равные $1$).
Рассмотрим чертёж ортогональной системы координат в пространстве. Отметим на ней орты $i, j, k$.
Рисунок 3. Чертёж ортогональной системы координат в пространстве. Автор24 — интернет-биржа студенческих работ
$i, j, k$ образуют правую связку. Система координат в данном случае называется правой.
Система координат называется левой, когда орты образуют левую связку. То есть:
Рисунок 4. Левая система координат. Автор24 — интернет-биржа студенческих работ
Подведём итог. В статье мы дали определение связки тройки векторов, описали правую и левую тройку векторов, а также правую и левую систему координат, как вытекающую тему из определения правой и левой тройки векторов. Стоит сказать, что на практике определение правой и левой тройки векторов со временем происходит интуитивно или «на автомате». Самое важное, это один раз понять, как это делается. Также стоит заметить, что чаще в задачах используется всё-таки правая тройка векторов и соответственно правая система координат.
03.07. Правые и левые тройки векторов. Правые и левые системы координат
Три некомпланарных вектора Взятых в указанном
Взятых в указанном
Порядке ( — первый вектор,
— первый вектор, — второй,
— второй, — третий) и приложенных в одной точке (рис. 3.12, а, б), называют тройкой векторов
— третий) и приложенных в одной точке (рис. 3.12, а, б), называют тройкой векторов Будем смотреть с конца
Будем смотреть с конца
Вектора с на плоскость, определяемую векторами Если кратчайший поворот
Если кратчайший поворот



От вектора К вектору
К вектору Совершается против часовой стрелки, то тройка векторов
Совершается против часовой стрелки, то тройка векторов  Называется правой 1 (рис. 3.12, а), если указанный поворот совершается по часовой стрелке, тройка
Называется правой 1 (рис. 3.12, а), если указанный поворот совершается по часовой стрелке, тройка Называется левой (рис. 3.12, б).
Называется левой (рис. 3.12, б).
Две тройки, обе правые или обе левые, называются тройками одной ориентации; если одна тройка является правой, а другая левой, то они называются тройками различной ориентации.
При круговой перестановке векторе® (первый заменяется вторым, второй — третьим, третий — первым, рис. 3.12, е) ориентация тройки не меняется (см. рис. 3.12, а, б).
Бели поменять местами два вектора, то ориентация тройки меняется, например если — правая тройка, то тройка
— правая тройка, то тройка (тех же векторов, взятых в порядке
(тех же векторов, взятых в порядке
 ) будет левой.
) будет левой.
Прямоугольная декартова система координат называется правой, если тройка базисных векторов Правая; если эта тройка левая, то система координат называется левой.
Правая; если эта тройка левая, то система координат называется левой.
Взаимная тройка векторов как найти

и в общем случае ни один из коэффициентов не равен нулю. В развернутом виде выражение достаточно далеко от той идеальной простоты, которую мы имели в декартовой системе координат. Частично положение можно исправить, если для выражения векторов и использовать различные базисы. Действительно, если помимо базиса , , использовать некоторый базис , , (верхнее положение индексов мы использовали для того, чтобы отличить этот базис от основного) и при этом потребовать, чтобы (порядок индексов в символах Кронекера не имеет значения), то
, где означает координату вектора во вспомогательном базисе .
Заручившись поддержкой вспомогательной системы координат, которую принято называть взаимной , мы получаем максимально простое выражение для скалярного умножения.
Сама же взаимная система координат полностью определяется основной системой и условиями , которые словами можно выразить так:
1. Каждый базисный вектор взаимной системы ортогонален ко всем разноименным с ним базисным векторам основной системы.
2. Длина базисного вектора взаимной системы выбирается таким образом, чтобы скалярное произведение его на одноименный вектор основной системы равнялось единице.
Сами векторы взаимного базиса удобнее всего вычислить через их координаты. Координаты можно вычислить либо в основном базисе, либо в некотором вспомогательном. Мы используем обе эти возможности. Для начала покажем, как можно вычислить координаты векторов взаимного базиса во вспомогательной декартовой системе координат. Воспользуемся тем, что
Пусть и – координаты векторов основного и взаимного базисов в декартовой системе координат, тогда
Умножив правую и левую часть уравнения на матрицу
, или в краткой записи .
То есть матрица координат взаимного базиса равна обратной и транспонированной матрице координат основного базиса в некоторой декартовой системе координат.
Рассмотрим простой в вычислительном отношении пример на нахождение взаимного базиса для системы координат на плоскости.
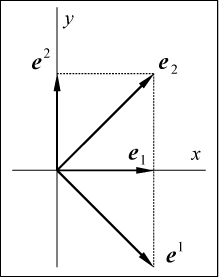 Рис. 45
Рис. 45
Пусть векторы основного базиса и (рис. 45) заданы своими координатами в декартовой системе координат:
Нахождение взаимного базиса в пространстве усложняется только за счет процедуры вычисления обратной матрицы, других принципиальных отличий нет.
Теперь воспользуемся другой более общей возможностью и выразим векторы взаимного базиса через векторы основного: . Умножим скалярно данное уравнение на вектор :
В свое время для скалярного произведения векторов основного базиса мы ввели обозначение . Логично тот же принцип использовать и для обозначения скалярного произведения векторов взаимного базиса: . Следовательно, .
Теперь равенство умножим слева и справа на вектор : . Из чего можно заключить, что матрица, составленная из коэффициентов , является обратной по отношению к матрице метрического тензора, то есть . Отсюда также следует, что в принятых нами ранее обозначениях. Коэффициенты матриц и принято рассматривать как координаты одного и того же метрического тензора только в разных координатных системах – основной и взаимной.
Вернемся к нахождению векторов взаимного базиса.
Пусть и – векторы основного базиса, причем , угол между ними (рис. 46).
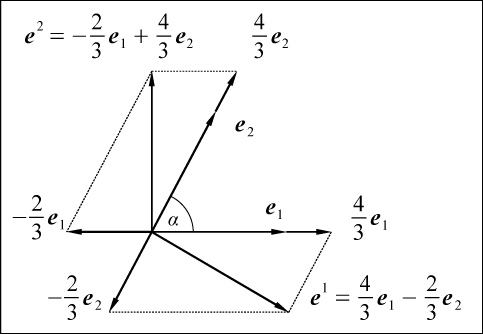 Рис. 46
Рис. 46
Найдем координаты метрического тензора в основном и во взаимном базисах.
И, воспользовавшись уравнением , находим векторы взаимного базиса


Основная и взаимная системы координат связаны друг с другом соотношениями . Выбирая основную систему, мы автоматически определяем и взаимную систему координат. Мы знаем, что при переходе к новым координатам, векторы базисов новой и старой систем координат связаны соотношением
которое принято называть ковариантным преобразованием. Соответственно и векторы основного базиса, и индексы, которыми они пронумерованы, называются ковариантными.
Координаты вектора в основной системе координат изменяются в соответствии с другим законом:
который называется контравариантным. Матрица, определяющая контравариантное преобразование, является обратной и транспонированной по отношению к матрице ковариантного преобразования:
С этим и связан выбор названий – ковариантный и контравариантный . Соответственно и координаты вектора в основной системе координат, и индексы, которыми они пронумерованы, называются контравариантными. Ковариантные индексы принято писать внизу, а контравариантные – вверху. Мы с самого начала старались придерживаться этого правила, хотя до настоящего момента нам было сложно объяснить причину необычного для индекса верхнего положения.
Мы пока еще не пытались выяснить законы преобразования векторов взаимного базиса и координат векторов в этом базисе, но если принятые нами обозначения не являются случайными, то векторы взаимного базиса должны быть контравариантными, а координаты – ковариантными. Проверим это предположение. Для начала найдем закон преобразования контравариантных координат метрического тензора. Все операции будем выполнять в индексной форме с дословным переводом на язык матриц. Начнем с того, что матрицы и координат метрического тензора являются взаимно обратными, следовательно, и .
Здесь мы использовали известный закон преобразования ковариантных координат метрического тензора.
Умножаем на и суммируем по всем возможным значениям индекса n’ . Такая операция называется сверткой по индексу n’ . В матричном виде операции свертки соответствует умножение на матрицу .
Матрицы и взаимно обратные, поэтому и .
При свертке с символом Кронекера общий текущий индекс n в заменяется на второй символ m .
Свертываем правую и левую части равенства с .
В этом выводе мы постарались продемонстрировать некоторые часто используемые приемы работы с индексами. Матричный перевод мы привели только в порядке пояснения, поскольку действия с матрицами более привычны. В данном случае преобразования в индексной форме не очень эффективны, поскольку мы вынуждены несколько раз последовательно выполнять операцию свертки. Выполняя те же преобразования только в матричной форме, мы быстрее приходим к результату. Покажем это на сей раз без комментариев.
А так как , а , то
Приведем для сравнения оба закона вместе.
Теперь перейдем к законам преобразования для векторов взаимного базиса и ковариантных координат вектора.
А что мы можем сказать про ковариантные координаты вектора, то есть про координаты вектора во взаимном базисе? До сих пор мы говорили только про сам базис, и еще ни разу не представилась возможность поговорить о координатах. Начнем с того, что мы знаем, то есть с контравариантных координат.
Пусть произвольный вектор. Воспользуемся тем, что . Следовательно, . Откуда получаем, что . Аналогично можно получить, что . Сведем полученные результаты в таблицу.
Операции, которые мы свели в таблицу, принято называть операциями поднятия и опускания индексов. Часто используют более образное название – » жонглирование индексами «. Операции по жонглированию индексами выполняются при помощи метрического тензора и позволяют легко переходить от ковариантных координат к контравариантным, и наоборот.
Перейдем к законам преобразования ковариантных координат вектора при изменении системы координат.
Пусть произвольный вектор, заданный своими ковариантными координатами в старой системе координат. Запишем тот же самый вектор в новой системе координат: . Следовательно, .
Сведем законы преобразования для векторов базиса и координат векторов в одну таблицу.
Определение правой и левой тройки векторов
Вы будете перенаправлены на Автор24
Понятие тройки векторов
Из курса физики известно, что скалярные величины или скаляры — это величины, вполне определяемые одним численным значением (например, масса, температура, объём, расстояние и пр.). То есть любое вещественное число является скаляром.
Векторные величины или векторы — это величины, которые определяют и численным значением, и направлением. Например, скорость.
Линейно зависимыми называются такие векторы $a,b,c. $, что если подобрать такие числа $x,y,z. $, из которых по крайней мере одно не равно $0$, то будет иметь место тождество $xa+yb+zc+. =0$. Если три вектора $a,b,c$ не равны $0$ и линейно зависимы, то они компланарны.
Связка трёх векторов — это приведённая к общему началу тройка некомпланарных векторов $a,b,c$.
Определение правой и левой тройки векторов
Приведём чертёж правой связки.
Рисунок 1. Чертёж правой связки. Автор24 — интернет-биржа студенческих работ
Рассмотрим кратчайшее вращение $\vec =a$ к $\vec =b$ на плоскости $OAB$ со стороны направления $\vec =c$. Мы увидим, что вращение идёт против часовой стрелки.
Если большой палец и указательный пальцы левой руки вытянуть, а средний согнуть под углом ладони, то три пальца в порядке большой-указательный-средний составят правую связку. Те же пальцы на левой руке составят левую связку.
На чертеже левой связки то же вращение идёт по часовой стрелке.
Рисунок 2. Чертеж левой связки. Автор24 — интернет-биржа студенческих работ
Готовые работы на аналогичную тему
Способы преобразования правой связки в левую и обратно:
- перестановка местами двух любых векторов;
- изменение знака при одном из векторов;
- замена какого-нибудь вектора его зеркальным отображением относительно плоскости двух других векторов.
Правая и левая системы координат
Напомним, что координатная ось — это ось, на которой выбрано начало и единица масштаба.
Ортогональная или прямоугольная система координат в пространстве — это система из трёх взаимно перпендикулярных координатных осей $Ox, Oy$ и $Oz$ с общим началом $O$. Ортами в ортогональной системе координат называют единичные векторы (то есть векторы равные $1$).
Рассмотрим чертёж ортогональной системы координат в пространстве. Отметим на ней орты $i, j, k$.
Рисунок 3. Чертёж ортогональной системы координат в пространстве. Автор24 — интернет-биржа студенческих работ
$i, j, k$ образуют правую связку. Система координат в данном случае называется правой.
Система координат называется левой, когда орты образуют левую связку. То есть:
Рисунок 4. Левая система координат. Автор24 — интернет-биржа студенческих работ
Подведём итог. В статье мы дали определение связки тройки векторов, описали правую и левую тройку векторов, а также правую и левую систему координат, как вытекающую тему из определения правой и левой тройки векторов. Стоит сказать, что на практике определение правой и левой тройки векторов со временем происходит интуитивно или «на автомате». Самое важное, это один раз понять, как это делается. Также стоит заметить, что чаще в задачах используется всё-таки правая тройка векторов и соответственно правая система координат.
Взаимная тройка векторов как найти
Для дальнейшего изучения свойств пространства необходимо ввести определение ориентации пространства. Строгая теория, касающаяся этого понятия не очень сложна, но достаточно суха. В связи с этим ограничимся лишь некоторыми “качественными” пояснениями.
Итак, все упорядоченные некомпланарные тройки векторов могут быть разбиты на два непересекающихся класса: правые тройки и левые тройки.
Определение 1: Упорядоченная тройка некомпланарных векторов а 1 , а 2 , а 3 называется правой, если наблюдателю, находящемуся внутри телесного угла, образованного этими векторами, кратчайшие повороты от а 1 к а 2 и от а 2 к а 3 кажутся происходящими против часовой стрелки. Если повороты происходят по часовой стрелке, то тройка – левая.
Есть и ещё один способ разделить эти два класса:
Правило правой руки: Совместите начала всех векторов тройки в одной точке. Представьте, что в этой точке находится ладонь Вашей правой руки. Совместите большой палец с первым вектором базиса, а указательный – со вторым. Если теперь вы сможете совместить средний палец с третьим вектором, то рассматриваемая тройка векторов – правая. Если нет – левая.
Выбрав один из двух классов и назвав все входящие в него базисы “положительными” мы зададим ориентацию пространства.
Далее будем считать положительными правые тройки векторов. Все дальнейшие определения будем давать с учетом этого
Определение 2: Скалярное произведение ставит в соответствие паре векторов a и b число ( a , b )=| a | · | b | · cosφ a , b .
Свойства скалярного произведения:
1. коммутативность: ( a , b )=( b , a )
4. Дистрибутивность: ( a 1 + а 2 , b )= ( a 1 , b )+ ( a 2 , b )
5. ( а , λ ·b )= λ · ( a , b ) λ R .
Утверждение 1: В декартовом базисе если а = , b = , то ( a , b )= x 1 · x 2 + y 1 · y 2 + z 1 · z 2 .
Пример 1. Найти угол между векторами.
Определение 3: Векторным произведением упорядоченной пары векторов a и b называется вектор [ a , b ], такой что
- | [ a , b ] |=S a , b , где S a , b – площадь параллелограмма, построенного на векторах a и b . (Если a || b , то S a , b =0.)
- a[ a , b ] b .
- a, b , [ a , b ] – правая тройка.
Свойства векторного произведения:
Утверждение 2: В декартовой системе координат (базис i , j , k ), a = , b =
Пример 2. Вычислить площадь параллелограмма, построенного на векторах a и b.
Определение 4: Смешанным произведением упорядоченной тройки векторов a , b и c называется число , b , c> , т.ч. a , b , c >=([ a , b ], c ).
Утверждение 3: a , b , c >=V a , b , c , если a , b , c – правая тройка, или a , b , c >= -V a , b , c , если a , b , c – левая тройка. Здесь V a , b , c – объём параллелепипеда, построенного на векторах a , b и c . (Если a , b и c компланарны, то V a , b , c =0.)
Утверждение 4: В декартовой системе координат, если a = , b = ,
Пример 3. Проверка компланарности векторов.
Пример 4. Принадлежность 4 точек одной плоскости.
Пример 5. Вычислить объем тетраэдра и его высоту.
Исправляем ошибки: Нашли опечатку? Выделите ее мышкой и нажмите Ctrl+Enter