Определитель матрицы: алгоритм и примеры вычисления определителя матрицы
Перед тем как находить и считать определитель, дадим определение определителю матрицы.
Что такое определитель матрицы или детерминант матрицы? Определитель матрицы — это некоторое число, с которым можно сопоставить любую квадратную матрицу А = ( a i j ) n × n .
|А|, ∆ , det A — символы, которыми обозначают определитель матрицы.
Как найти определитель матрицы? Вычислить определитель или найти определитель можно с помощью разных способов (в том числе онлайн и при помощи калькулятора). Конкретный способ поиска и того, как решать, выбирают в зависимости от порядка матрицы.
Определитель матрицы второго порядка можно вычислять по формуле:
d e t A = 1 — 2 3 1 = 1 × 1 — 3 × ( — 2 ) = 1 + 6 = 7
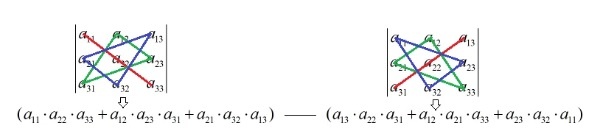
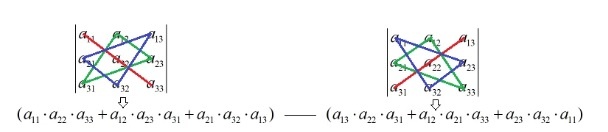
Определитель матрицы 3-го порядка: правило треугольника
Нахождение определителя матрицы 3-го порядка осуществляется по одному из правил:
- он может считаться по правилу треугольника;
- расчет также проводится по правилу Саррюса.
Как найти определитель матрицы третьего порядка по методу треугольника (определитель матрицы 3×3)?
а 11 а 12 а 13 а 21 а 22 а 23 а 31 а 32 а 33 = a 11 × a 22 × a 33 + a 31 × a 12 × a 23 + a 21 × a 32 × a 13 — a 31 × a 22 × a 13 — a 21 × a 12 × a 33 — a 11 × a 23 × a 32
А = 1 3 4 0 2 1 1 5 — 1
d e t A = 1 3 4 0 2 1 1 5 — 1 = 1 × 2 × ( — 2 ) + 1 × 3 × 1 + 4 × 0 × 5 — 1 × 2 × 4 — 0 × 3 × ( — 1 ) — 5 × 1 × 1 = ( — 2 ) + 3 + 0 — 8 — 0 — 5 = — 12
Правило Саррюса
Чтобы вычислить определитель по методу Саррюса, необходимо учесть некоторые условия и выполнить следующие действия:
- дописать слева от определителя два первых столбца;
- перемножить элементы, которые расположены на главной диагонали и параллельных ей диагоналях, взяв произведения со знаком «+»;
- перемножить элементы, которые расположены на побочных диагоналях и параллельных им, взяв произведения со знаком «—».
а 11 а 12 а 13 а 21 а 22 а 23 а 31 а 32 а 33 = a 11 × a 22 × a 33 + a 31 × a 12 × a 23 + a 21 × a 32 × a 13 — a 31 × a 22 × a 13 — a 21 × a 12 × a 33 — a 11 × a 23 × a 32
А = 1 3 4 0 2 1 — 2 5 — 1 1 3 0 2 — 2 5 = 1 × 2 × ( — 1 ) + 3 × 1 × ( — 2 ) + 4 × 0 × 5 — 4 × 2 × ( — 2 ) — 1 × 1 × 5 — 3 × 0 × ( — 1 ) = — 2 — 6 + 0 + 16 — 5 — 0 = 3
Методы разложения по элементам строки и столбца
Чтобы вычислить определитель матрицы четвертого порядка, можно воспользоваться одним из 2-х способов:
- разложением по элементам строки;
- разложением по элементам столбца.
Представленные способы определяют вычисление определителя n как вычисление определителя порядка n-1 за счет представления определителя суммой произведений элементов строки (столбца) на их алгебраические дополнения.
Разложение матрицы по элементам строки:
d e t A = a i 1 × A i 1 + a i 2 × A i 2 + . . . + а i n × А i n
Разложение матрицы по элементам столбца:
d e t A = а 1 i × А 1 i + а 2 i × А 2 i + . . . + а n i × А n i
Если раскладывать матрицу по элементам строки (столбца), необходимо выбирать строку (столбец), в которой(-ом) есть нули.
А = 0 1 — 1 3 2 1 0 0 — 2 4 5 1 3 2 1 0
- раскладываем по 2-ой строке:
А = 0 1 — 1 3 2 1 0 0 — 2 4 5 1 3 2 1 0 = 2 × ( — 1 ) 3 × 1 — 1 3 — 2 5 1 3 1 0 = — 2 × 1 — 1 3 4 5 1 2 1 0 + 1 × 0 — 1 3 — 2 5 1 3 1 0
- раскладываем по 4-му столбцу:
А = 0 1 — 1 3 2 1 0 0 — 2 4 5 1 3 2 1 0 = 3 × ( — 1 ) 5 × 2 1 0 — 2 4 5 3 2 1 + 1 × ( — 1 ) 7 × 0 1 — 1 2 1 0 3 2 1 = — 3 × 2 1 0 — 2 4 5 3 2 1 — 1 × 0 1 — 1 2 1 0 3 2 1
Свойства определителя
- если преобразовывать столбцы или строки незначительными действиями, то это не влияет на значение определителя;
- если поменять местами строки и столбцы, то знак поменяется на противоположный;
- определитель треугольной матрицы представляет собой произведение элементов, которые расположены на главной диагонали.
В рамках темы советуем обратиться к модулю определителя.
А = 1 3 4 0 2 1 0 0 5
d e t А = 1 3 4 0 2 1 0 0 5 = 1 × 5 × 2 = 10
Матричныый определитель, который содержит нулевой столбец, равный нулю (представляет собой минор).
О том, как правильно понимать определитель матрицы
Помните байку про интеграл, который пригодился в жизни? Так вот, у определителя тоже есть замечательное применение — пугать детей формулой Лейбница. А давайте даже перепишем ее куда-нибудь в середину, чтобы всем было хорошо видно.
Расшифровывается это дело следующим образом: если у нас есть матрица
над некоторым полем , то определителем этой матрицы называют сумму всевозможных произведений, состоящих изэлементов этой матрицы, взятых по одному из каждой строки и из каждого столбца, причем каждое произведение входит в эту сумму с тем знаком, который имеет соответствующая перестановка индексов этих элементов в этом произведении.
Возникает естественный вопрос: зачем нужна такая навороченная конструкция. Можно конечно сказать, что смысл проявится позже, пока просто запомните и не задавайте лишние вопросы и т.д., но если быть откровенным, то стоит признать — такое определение определителя не мотивировано ничем. А между прочим именно оно является самым общеизвестным.
Другой способ введения определителя связан с его характеристическим свойством. Напомним, полилинейной формой называется функция , определенная на декартовом произведении некоторых векторных пространств (заданных над одним и тем же полем), принимающая значения в поле и линейная по каждому аргументу: . Форма называется кососимметрической, если при инверсии любых двух (не обязательно соседних) аргументов она меняет знак.
С кососимметричностью есть одна небольшая проблема. Возьмем для определенности обычное поле действительных чисел и рассмотрим какую-нибудь -местную кососимметрическую формунад ним. Посмотрим, чему может быть равно , т.е. чему может равняться эта форма на наборе векторов, содержащем 2 равных вектора. При инверсии этих двух векторов форма с одной стороны не меняется, а с другой стороны, меняет знак. Единственное действительное число, не меняющееся при изменении знака — это ноль. Зададимся теперь вопросом, а будет ли справедливым это свойство (равенство формы нулю на наборе, содержащем пару равных векторов) в случае произвольного поля. Если , то , следовательно . Т.к. в полях нету делителей нуля, то в случае поля характеристики 2 получаем, что . Но что будет в случае, если характеристика равна 2? А будет то, что из равенства не следует, что . В самом деле, возьмем поле вычетов по модулю 2 (2 простое число, так что это действительно поле, а не просто кольцо). В этом поле единица обратна сама себе (т.к. ), т.е. . Вместе с этим единица, очевидно, не равна нулю (это свойство выполняется в любом поле наряду с тем фактом, что в любом же поле всегда существуют ноль и единица; требование нетривиальности кольца входит в определение поля). Предыдущие рассуждения показывают, что из «наивной» кососимметричности (определение которой написано выше) в случае поля характеристики 2 еще не вытекает равенство нулю соответствующей формы на наборе, содержащем равные вектора.
Можно конечно всюду далее рассматривать исключительно поля характеристики 2 и пользоваться «слабым» определением кососимметричности, а можно поступить умнее и немного усилить определение кососимметричности специально для полей характеристики 2 так, чтобы обычная кососимметричность следовала из «сильной». Для этого достаточно потребовать 2 вещи: во-первых, форма должна быть полилинейна, а во-вторых она должна принимать значение ноль всегда, когда среди ее аргументов есть равные. Свойство, которое вытекало из «наивной» кососимметричности для полей характеристики 2 само теперь является составной частью определения кососимметричности (правда только для полей характеристики 2).
Из полилинейности и равенства формы нулю на строках с равными аргументами следует, что если к одному вектору прибавить другой, умноженный на число, то значение формы не изменится. При умножении какого-либо вектора на число 0 сама форма умножается на это число (в частности, если обратить знак какого-либо вектора из набора, то знак самой формы тоже поменяется.
Произвести инверсию векторов в наборе аргументов можно с помощью преобразований этих двух типов. И если внимательно проследить цепочку преобразований, то в конце концов окажется, что форма поменяла знак.
Далее под кососимметричностью будем понимать кососимметричность в «сильном» смысле.
Определение
Определитель матриц- это единственная кососимметрическая полилинейная форма строк матрицы, нормированная единицей на единичном наборе векторов.
Надо сказать, это не самое плохое определение. Но и оно не лишено недостатков. Основные вопросы здесь возникают по поводу кососимметричности. В первую очередь непонятно, почему это свойство вообще важно. Ну меняет функция знак при перестановке двух аргументов и пусть меняет, почему мы так стремимся исследовать именно это свойство, а не какое-нибудь другое. Но здесь все еще хуже. Мы хотим, чтобы форма еще и принимала нулевое значение на наборе, содержащем равные вектора. И в некотором смысле для нас это даже важнее самой кососимметричности, раз мы стали подгонять определение последней под выполнение этого свойства. Все эти экзерсизы с характеристиками выглядят довольно искусственно.
Критикуешь — предлагай
В действительности есть очень простой и естественный пусть построения определителя, при котором все эти вопросы отпадают сами собой. И я постараюсь по возможности максимально последовательно описать этот способ.
Начнем с некоторых предварительных замечаний. Основным объектом изучения линейной алгебры являются конечномерные векторные пространства. Неформально говоря, на любое — мерное векторное пространство над полемможно смотреть как на «координатное» пространство, состоящее из упорядоченных наборов длины элементов поля. Более строго, пусть у нас есть- мерное векторное пространство над полем . Выбор (упорядоченного) базиса этого пространства индуцирует изоморфизм , ставящий в соответствие каждому вектору набор его координат в базисе . Таким образом, во всех дальнейших построениях речь пойдет по большей части про вектора координатного пространства.
Очевидно, некоторый набор векторов пространства является линейно (не)зависимым, тогда и только тогда, когда соответствующий ему набор векторов пространства будет линейно (не)зависимым.
Свойство линейной зависимости/независимости действительно очень важно. Дело в том, что система из векторов пространства будет линейно зависимой тогда и только тогда, когда найдется вектор в этой системе, который можно линейно выразить через остальные.
Довольно естественным выглядит желание иметь некоторую функцию- индикатор линейной зависимости векторов. Учитывая, что любое векторное пространство «оцифровывается» своим координатным пространством, достаточно иметь такую функцию, определенную на декартовом произведениикопий пространстваи принимающую значения в поле. Таким образом, мы предъявляем к функциивсего лишь 2 очень естественных требования:
Она должна принимать нулевое значение на любой линейно зависимой системе векторов.
На аргументы этой функции удобно смотреть как на строки матрицы
Заметим, на данном этапе мы еще даже не знаем, существует ли такая функция или нет. Но мы можем в предположении ее существования посмотреть на ее поведение.
. Действительно, строка аргументов, содержащая пару равных значений, очевидно, линейно зависима, а значит функциябудет принимать на ней нулевое значение.
кососимметрична (в любом смысле, учитывая полилинейность + п.1). Доказательство абсолютно аналогично тому, которое находится выше под спойлером.
Рассмотрим, чему равнана некотором наборе строк :
Здесь мы просто выразили векторы через единичные, затем по полилинейности получили сумму по всем упорядоченным наборам соответствующих произведений, выкинули из них те, которые содержат повторяющиеся аргументы (тем самым получив сумму по всем перестановкам), а затем применили обратные перестановки к единичным векторам.
Смотрим на последнюю строчку в получившейся формуле и видим множитель . Чтобы упростить формулу и не таскать лишний множитель, добавим к тем 2 требованиям к функциитретье требование: .
Таким образом, если интересующая нас функциясуществует, то она имеет вид:
Нарисовалась знакомая нам формула Лейбница. Самое замечательное то, что в ней нет свободных переменных, а это значит, что мы бесплатно получили единственность интересующей нас функции.
Осталось лишь доказать существование. Капитан намекает, что для этого достаточно взять ту функцию, которая у нас получилась.
А дальше дело техники. Проверяем, что получили мы действительно, что хотели и даже больше. Полученную функцию называем определителем и спокойно приступаем к доказательству основных его свойств.
Свойства определителя матрицы и его нахождение

Матрица в математике — это таблица упорядоченных взаимосвязанных элементов, состоящая из m-строк и n-столбцов. В квадратной матрице m=n, то есть A = (n×n). Одной из основных ее характеристик, применяемых в решении большинства задач, является определитель.
Определитель матрицы — что это такое, его свойства
Точного определения этого термина не существует, однако для понимания:
Определитель — это некоторая скалярная величина, с которой можно сопоставить любую квадратную матрицу.
Три альтернативных обозначения: |А|, Δ, det A. Методы вычисления варьируется в зависимости от порядка матрицы (количества строк или столбцов).
Что называют детерминантом
При изучении матричного определителя часто мелькает латинское слово «детерминант». На самом деле, разницы нет — это одно и то же понятие. Однако детерминант имеет множество значений в других областях науки, поэтому в математике чаще всего используют его русский перевод.
Расстановка индексов в матрице
Индексы — это координаты элемента в системе. У каждого элемента их два: первый указывает на строку, второй — на столбец.
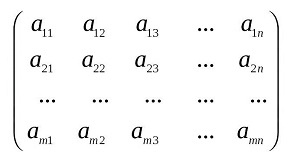
Поскольку порядок — это количество строк или столбцов в квадратной матрице, то его можно определить по m-индексу нижней строки или n-индексу крайнего правого столбца. Такой способ применяется в том случае, если таблица очень большая и считать строки (столбцы) неудобно.
Алгебраическое определение
Алгебраический смысл таков:
Определитель матрицы А = (n×n) — это алгебраическая сумма n слагаемых.

Каждое слагаемое — это произведение n-элементов, взятых по одному из каждой строки и каждого столбца, умноженное на (-1) в степени Np (количество инверсий).
Геометрическое определение
Геометрический смысл таков:
Определитель — это объем параллелепипеда, который получается, если рассмотреть строки в качестве векторов, образующих ребра.
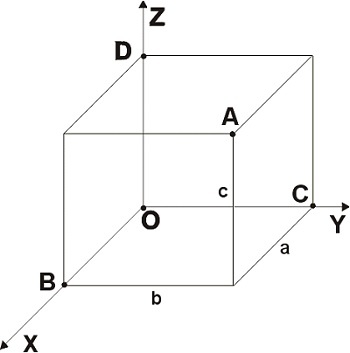
Еще раз: количество строк (столбцов) равно количеству векторов. Таким образом, если нам дана матрица А = (2×2), то она является двухмерным параллелограммом, а детерминант — площадью данной фигуры. Если А = (3×3), то это трехмерный параллелепипед, а определитель — его объем.
Общая схема вычисления определителей
Для матрицы 1-го порядка определитель равен его единственному элементу:
Для 2-го порядка — произведение элементов главной диагонали минус произведение побочной.
Для нахождения А = (3×3) есть два способа:
- правило треугольника;
- правило Саррюса.
Правило треугольника выглядит следующим образом:

Если показывать графически, то:
По правилу Саррюса нужно:

- Дописать слева от определителя два первых столбца.
- Перемножить элементы главной диагонали и параллельных диагоналей, взяв произведения со знаком «+».
- Перемножить элементы побочных диагоналей и параллельных им, взяв произведения со знаком «–».
Матрицы от 4-го порядка считают разложением строк или столбцов, но такой метод применяется редко и требует знаний об алгебраическом дополнении и миноре.
Вычисление определителя матрицы, примеры с решением
Задача №1: вычислить детерминант матрицы A = (n×n), равной
\(|а_ <21>а_<22>| = а_ <11>* а_ <22>— а_ <12>* а_<21>\) , следовательно
det A = 11 * (-2) – (-15) * (-3) = (-22) – 45 = (-67)
Ответ: det A = (-67)
Задача №2: определить det A матрицы, равной
Решение: если методом треугольника, то:
det A = (1 * 2 * (-1) + 3 * 1 * 1 + 0 * 5 * 4) — (4 * 2 * 1 + 3 * 0 * (-1) + 1 * 5 * 1) =
Определитель матрицы
Определи́тель (или детермина́нт) — одно из основных понятий линейной алгебры. Определитель матрицы является многочленом от элементов квадратной матрицы (т.е. такой, у которой количество строк и столбцов равны). В общем случае матрица может быть определена над любым коммутативным кольцом, в этом случае определитель будет элементом того же кольца.
Определитель матрицы А обозначается как: det(A), |А|, ||A|| или Δ(A).
Содержание
Определение через разложение по первой строке

Схема расчета определителя матрицы .
Для матрицы порядка 1 детерминантом является сам единственный элемент этой матрицы:

Для матрицы детерминант определяется как

Для матрицы определитель задаётся рекурсивно:
 — дополнительный минор к элементу a1j . Эта формула называется разложением по строке.
— дополнительный минор к элементу a1j . Эта формула называется разложением по строке.

В частности, формула вычисления определителя матрицы такова:
 это верно:
это верно:
 это верно:
это верно:

Для матрицы справедлива форумула:
 , где
, где  и т. д. — строчки матрицы,
и т. д. — строчки матрицы,  — определитель такой матрицы.
— определитель такой матрицы.